Abstract
The relationship between the inverse Langevin function and the proposed r0-r1-Lambert W function is defined. The derived relationship leads to new approximations for the inverse Langevin function with lower relative error bounds than comparable published approximations. High accuracy approximations, based on Schröder’s root approximations of the first kind, are detailed. Several applications are detailed.
1. Introduction
The Langevin function arises in diverse contexts including the classical model of paramagnetism [1], and the ideal freely jointed chain model, e.g., [2]. It is defined, e.g., [3], according to:
Whilst the Langevin function is well defined, its inverse, denoted , does not have a known analytical form and significant research efforts have led to many approximations with the papers, for example, and in chronological order, by Itskov (2012) [4], Nguessong (2014) [5], Darabi (2015) [6], Jedynak (2015) [7], Kröger (2015) [8], Marchi (2015) [9], Rickaby (2015) [10], Petrosyan (2017) [11], Jedynak (2018) [12], Marchi (2019) [13], and Howard (2020) [14], providing useful approximations. Graphs of the Langevin function and the inverse Langevin function are shown in Figure 1.
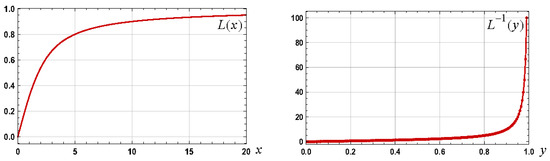
Figure 1.
Graphs of the Langevin and inverse Langevin functions.
Mező and Keady [15] detail the relationship between the inverse Langevin function and a generalization of the Lambert W function. Whilst such a relationship is important, it does not directly facilitate finding approximations for the inverse Langevin function as the generalized Lambert W function does not have an explicit analytical form. The contribution of this paper is to detail a relationship between the inverse Langevin function and the r0-r1-Lambert W function which is a generalization of the r-Lambert W function that has been considered by Mező [16], Mező and Baricz [17], and Jamilla [18]. The derived relationship leads to new approximations for the inverse Langevin function with potentially lower relative error bounds than comparable approximations. Improved approximations, based on Schröder’s root approximations of the first kind, e.g., [19,20,21], are detailed. Several applications of the results are also detailed.
Section 2 details the definitions that underpin the paper. Section 3 details the relationship between the inverse Langevin function and the proposed r0-r1-Lambert W function. Section 4 details approximations for the r0-r1-Lambert W function and, thus, the inverse Langevin function. Section 5 details the establishment of approximations of higher accuracy through the use of Schröder’s root approximations of the first kind. Several applications of the results are detailed in Section 6. A summary of results, and conclusions, are detailed in Section 7.
2. Definitions
By utilizing the exponential function-based definition for the hyperbolic cotangent function, the following alternative definition for the Langevin function is valid:
It then follows that the relationship between and is equivalently defined by either of the equations:
For , . The graph of the function is shown in Figure 2. This function underpins a link between the inverse Langevin function and a generalization of the Lambert W function. The following definitions are fundamental to establishing the required link.
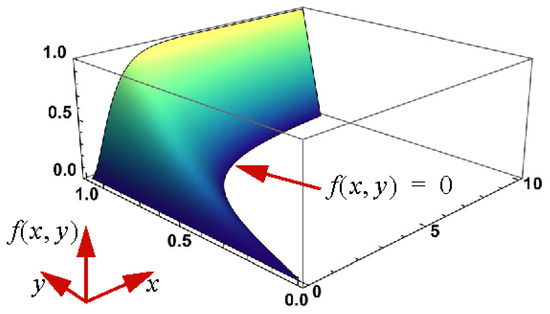
Figure 2.
Graph of f(x, y).
Definition 1.
Lambert W Function.
The Lambert W function, denoted W, is the inverse of h, i.e., , where h is defined according to:
For the general case, , the Lambert W function is multivalued, e.g., [22]. For the real case, , the principal branch of the Lambert W function, denoted , is associated with the interval whilst the negative one branch, denoted , is associated with the interval .
Definition 2.
Generalized Lambert W Function.
The generalized Lambert W function, e.g., [15], is denoted
and is the inverse of the function h which is defined according to
For the general case but often the real case is of interest.
Definition 3.
r-Lambert W Function.
The r-Lambert W function, e.g., [16,17,18], denoted or , is the inverse of defined according to
For the general case . A generalization of this function is the r0-r1-Lambert W function.
Definition 4.
r0-r1-Lambert W Function.
The r0-r1-Lambert W function, denoted or , is the inverse of which is defined according to:
For the general case . The real case is considered in this paper.
2.1. Link: Inverse Langevin Function and Generalized Lambert W Function
Manipulation of (3) (see [15] Section 2.2.1) leads to the relationship
which directly links the inverse Langevin function to the general Lambert W function. Whilst such a link is important, it does not directly facilitate finding approximations for the inverse Langevin function, as an explicit analytical approximation for the Lambert W function is unknown and research to develop approximations is ongoing, e.g., [23,24]. The relationship between the inverse Langevin function and the r0-r1-Lambert W function, which yields new approximations, is detailed below after the next subsection, which lists established approximations for the inverse Langevin function.
2.2. Published Approximations
Representative approximations for the inverse Langevin function include:
which, respectively, have been published in [5,8,11,13,14]. The relative error bounds (see definition below) that are associated with these approximations over the interval , respectively, are: , , , and .
2.2.1. Relative Error Bound
For an arbitrary function , defined over the interval , an approximating function has a relative error, at a point , defined according to . The relative error bound for the approximating function, over the interval , is defined according to:
In this paper, Mathematica has been used to facilitate analysis and to obtain numerical results. In general, relative error results associated with approximations have been obtained by uniformly sampling the interval with 1000 points.
3. Relationship between Inverse Langevin and r0-r1-Lambert W Function
With the function defined according to (4), it is the case that when . The following result then holds:
Theorem 1.
Relationship: r0-r1-Lambert W Function and Inverse Langevin Function
With and defined, respectively, by (9) and (4), the general result
holds for the case of when
It then follows that
and the inverse Langevin function can be defined according to
Proof of Theorem 1.
The proof is detailed in Appendix A. □
3.1. Determining Root of h
Consistent with (20), the inverse Langevin function can be defined once the appropriate root of is known. It can readily be shown that
which implies . However, this result is associated with a branch of which is not consistent with the validity of the relationship specified by (20). The branch of that is required can readily be seen by considering the nature of for the case of .
3.1.1. Graphs
For the case of , it is the case that and . Graphs of and , for the case of , are shown in Figure 3. The graph of is shown in Figure 4 for two set values of to illustrate the nature of the variation of for set values of . The variation, with , of the root of , that is to the left of , is shown in Figure 5.
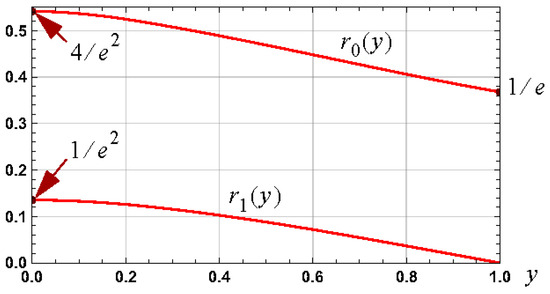
Figure 3.
Graphs of and for the case of y ∈ (0,1).
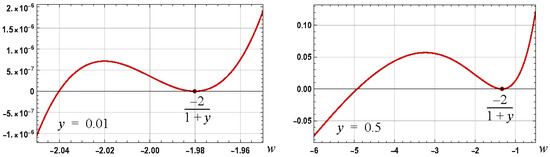
Figure 4.
Graphs of for the set values of of 0.01 and 0.5.
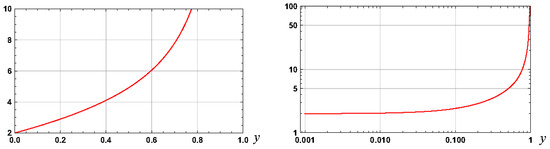
Figure 5.
Graphs of , , which is the negative of the root of that is to the left of .
3.1.2. Required Branch for Root of h
The variation of , with , is illustrated in Figure 4 along with the first negative root of as defined by (21). The required root is to the left of the local maximum of that is located left of the first negative root. To establish where this local maximum occurs, consider the derivative of :
The root of this function, denoted , occurs when , or, after a change of variable , where . As , for (see Figure 3), it is the case that
with solutions, consistent with the nature of the Lambert W function, e.g., [22], defined according to
where is the principal branch solution and is the negative one branch. It is the negative one branch that provides the required solution and, thus:
Hence, the goal is to establish the root of for the case of . The nature of , and its inverse , are illustrated in Figure 6 for the case of and a fixed value of .
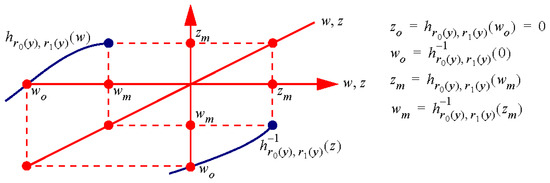
Figure 6.
Illustration of the functions and for fixed and .
4. Approximations for Inverse Langevin Function
Consistent with Theorem 1, an approximation to , for , leads to an approximation for the inverse Langevin function. To establish approximations for , first, consider the following two restricted domain approximations which arise from the analysis detailed in Appendix B:
These approximations are consistent with the first order approximation:
Consistency arises, first, by noting , , and thus, the approximation for is as required. Second, for the case of , , the approximation approaches as required. A measure of the error in this approximation is shown in Figure 7 and the relative error bound associated with the interval is .
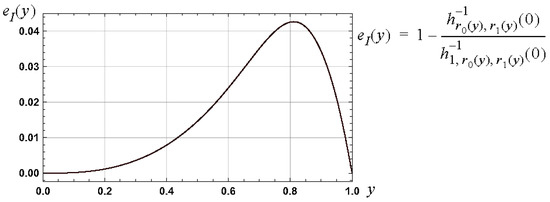
Figure 7.
Graph, over the interval , of a measure of the relative error, , in the approximation , as defined by (27), to .
The approximation defined by (27) and the relative error measure shown in Figure 7 are consistent with
and this relationship provides a useful basis for establishing better approximations. Improved approximations include:
Graphs of the magnitude of the relative errors in these approximations are shown in Figure 8. The respective relative error bounds associated with these approximations, and for the interval , are: , , , and .
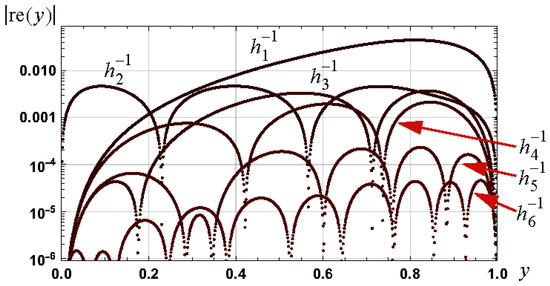
Figure 8.
Graphs of the magnitude of the relative error in approximations to as defined by (27) and (29) to (33).
4.1. Associated Langevin Approximations
Given the relationship , as stated in Theorem 1, the above approximations for , as specified by (27) and (28) to (33), lead, respectively, to the following approximations for the inverse Langevin function:
Graphs of the magnitude of the relative errors in these approximations are shown in Figure 9. The relative error bounds associated with these approximations, and for the interval , respectively, are: , , , , and .
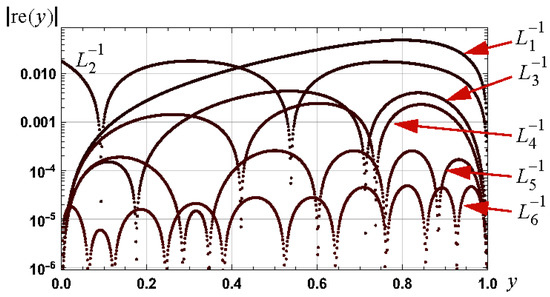
Figure 9.
Graphs of the magnitude of the relative error in approximations to as defined by (34) to (39).
Notes
The coefficients utilized in the approximations and are different and have been chosen to minimize their respective relative error bounds over the interval .
The fourth approximation, as given by (37), has a relative error bound of over the interval and is similar in form to that proposed by Kröger [8] and stated in (12). The proposed approximation includes an order seven (rather than six) polynomial and achieves a slightly lower relative error bound.
The fifth (38) and sixth (39) approximations achieve lower relative error bounds, respectively, than the published approximations provided by Nguessong [5] and Marchi [13] and which are stated in (14) and (15).
The proposed approximations complement the list of published approximations for the inverse Langevin function and with relative error bounds consistent with, or lower than, comparable published approximations. Additional approximations remain to be proposed.
5. Schröder Based Higher Order Approximations
The following general approximations for an inverse function arise from the Schröder root approximation of the first kind, e.g., [25] (Equation (21)), [19] (Equation (17)), [20] (Section 3) and [21]:
Theorem 2.
Schröder Based Approximations for an Inverse Function
Consider a real function that is differentiable up to at least order and is also strictly monotonic in an interval around a point which includes the root of that is close to . A order Taylor series for , based on the point , , yields the order Schröder approximation for , denoted , and defined according to
where is the operator denoting order differentiation. An explicit form is
Proof of Theorem 2.
This result arises from a Taylor series approximation for
at the point
and the inverse function theorem. See, for example, [21]. □
5.1. First, Second and Third Order Approximations for h−1(0)
Consider , with and as defined in (18), and an initial approximation for being denoted where the argument of is implicit and assumed to be on the interval . It then follows that the first, second, and third order Schröder based approximations for , denoted, respectively, , , and are:
The proofs for these results are detailed in Appendix C.
Results
The relative error bounds associated with the above approximations, and based on as specified by (27) and (29) to (33), are detailed in Table 1. Specific cases are detailed below.
5.2. First Order Approximations: Explicit Cases
The general first order approximation form specified by (42) leads to the approximations detailed below which are valid for . The associated approximations for the inverse Langevin function can then be defined consistent with Theorem 1.
5.2.1. Case 1
With the initial approximation specified by (27), it follows that
which has a relative error bound of . The relative error bound in the associated approximation for the inverse Langevin function is .
5.2.2. Case 2
With the approximation defined by (30), it follows, that
which has a relative error bound of . The relative error bound in the associated approximation for the inverse Langevin function is .
5.2.3. Case 3
With the approximation defined by (31), it follows that
which has a relative error bound of . The relative error bound in the associated approximation for the inverse Langevin function is .
5.2.4. Case 4
With the approximation defined by (33), it follows that
where
This approximation has a relative error bound of . The relative error bound in the associated approximation for the inverse Langevin function is .
5.3. Second Order Approximations
With the approximation defined by (31), it follows, from (43), that:
where and are defined by (47). The relative error bound for this approximation is . The relative error bound in the associated approximation for the inverse Langevin function is .
5.4. Direct First Order Schröder Approximation to Inverse Langevin Function
Consider the first order Schröder approximation to the inverse Langevin function, based on an initial approximation denoted , and defined by
The nature of depends on the form assumed for the Langevin function. For the case of defined according to , it follows that:
For the case of defined according to (3), it follows that:
Comparison
The approximations defined by (53) and (54) can be contrasted with approximating the inverse Langevin function according to the relationship stated in Theorem 1, i.e.,
where is the first order approximation defined according to (42). To compare the approximations defined by (54) and (55), consider the initial approximations
The first was proposed by Kröger [8] (stated above in (12)) and has a relative error bound of . The second approximation is specified in (31) and has a relative error bound of . Use of (56) in (54) yields the approximation
with a relative error bound of . In contrast, the use of (57) in (42), and then (55), leads to the approximation specified in (47), i.e.,
which has a relative error bound of . The associated approximation for is
and has a relative error bound of .
Clearly, (59) and (60) have a simpler form than (58) and yield an approximation for with a lower relative error bound. This, in part, is the rationale for the use of the link between the inverse Langevin function and the r0-r1-Lambert W function.
6. Applications
6.1. Limit Approximations
The approximations detailed in (26) lead to the following approximations for the inverse Langevin function after using the relationship defined in Theorem 1:
These approximations can be contrasted with established approximations. First, a Taylor series approximation for the inverse Langevin function, e.g., [4], is
Second, a first order approximation for the case of , , is (see Appendix B of [8]). The graphs of the relative errors associated with these approximations are shown in Figure 10. It is clear from these graphs that the approximations defined in (61) are inferior to established approximations for arguments close to zero or close to one. However, they serve as a useful basis for establishing approximations with low relative error bounds over the interval for and, hence, , as summarized in Table 2.
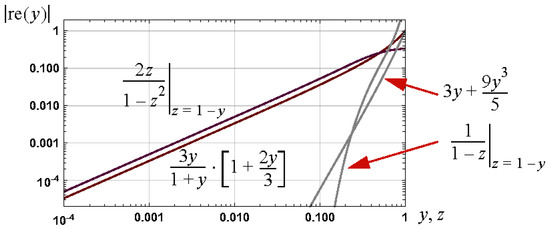
Figure 10.
Graph of the relative errors in approximations to the inverse Langevin function for the cases of and
6.2. Integral Results
As , the general integral result
assuming and are well defined, yields
The proposed approximations can be utilized to establish approximations for the integral of the inverse Langevin function. For example, use of the approximations specified by (36) and (37), in (64), yield approximations for the inverse Langevin function with the respective relative error bounds of and . The latter approximation is:
6.3. Roots of
Consistent with (21) and Theorem 1, the roots of , are and . A desirable extension to these results would be a specification of the roots of
for arbitrary values of and . Given the definitions of and , this, in general, is not possible. However, roots can be established for specific cases. For example, the roots of
are and , and arise from the case of , . As an example, the roots of
are and , and arise from the case of , .
Linear System Impulse Response
Note that is consistent with provided , i.e., the roots of are the negative of the roots of .
Consistent with (67), consider a linear system with an impulse response defined by
where , , . The transfer function of such a system is defined according to
and is consistent with a system comprising an integrator, a cascade of two integrators, and a second order system. The roots of the impulse response are and . The impulse response is shown in Figure 11 for the cases of .
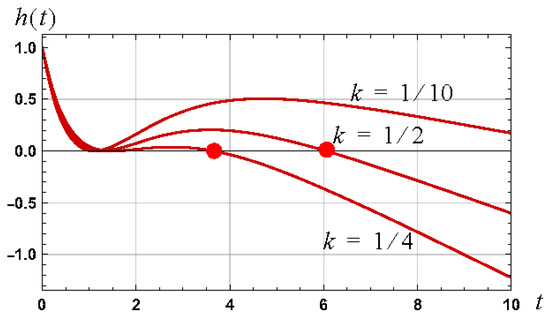
Figure 11.
Graph of the impulse response of the transfer function defined by (69) for values of .
7. Summary of Results and Conclusion
7.1. Summary of Results
The approximations to , along with their associated relative error bounds, are detailed in Table 1. The associated approximations for the inverse Langevin function are detailed in Table 2.

Table 1.
Summary of approximations for , as defined by (27) and (29) to (33), and their relative error bounds for the interval .
Table 1.
Summary of approximations for , as defined by (27) and (29) to (33), and their relative error bounds for the interval .
| Approximation | Definition | Relative Error Bound | Relative Error Bound: 1st Order—(42) | Relative Error Bound: 2nd Order—(43) | Relative Error Bound: 3rd Order—(44) |
|---|---|---|---|---|---|
| 4.07 |
Table 2.
Summary of approximations, based on the approximations to detailed in Table 1, for the inverse Langevin function along with their associated relative bounds for the interval . The relative error bounds for the first, second, and third order Schröder-based approximations arise from the direct use of the approximations in the general approximation form defined in Theorem 2.
Table 2.
Summary of approximations, based on the approximations to detailed in Table 1, for the inverse Langevin function along with their associated relative bounds for the interval . The relative error bounds for the first, second, and third order Schröder-based approximations arise from the direct use of the approximations in the general approximation form defined in Theorem 2.
| Approx. | Definition | Relative Error Bound | Relative Error Bound: First Order | Relative Error Bound: Second Order | Relative Error Bound: Third Order |
|---|---|---|---|---|---|
7.2. Conclusions
The relationship between the inverse Langevin function and the r0-r1-Lambert W function was defined. The derived relationship leads to new approximations for the inverse Langevin function with potentially lower relative error bounds than comparable published approximations.
It was shown that improved approximations for the r0-r1-Lambert W function, with significantly lower relative error bounds, can be defined by utilizing Schröder’s root approximations of the first kind. Approximations for the inverse Langevin function can then be defined by utilizing the established relationship between the two functions. An alternative approach is to directly use an establish approximation for the inverse Langevin function in the general Schröder approximation form. Examples were given to illustrate that the former approach is likely to lead to a simpler analytical expression for a set relative error bound.
It was shown how the defined approximations for the inverse Langevin function can be utilized to establish approximations for the integral of the inverse Langevin function, with, in general, low relative error bounds.
The link between the inverse Langevin function and the r0-r1-Lambert W function was utilized to establish the roots of the impulse response of a custom linear system comprising an integrator, a cascade of two integrators, and a second order system.
In terms of future research, it is noted that iterative approaches can be utilized to establish approximations with lower relative error bounds and several results for the inverse Langevin function have been detailed, e.g., [14,21]. Berinda [26] and Gdawiec [27], for example, provide an overview of iterative approaches that can be utilized for fixed point problems. In general, iterative approaches lead to analytical approximations with a high degree of complexity and rely on an initial approximation. To achieve results with modest complexity, a low order of iteration is required along with an initial approximation that has a low relative error bound and with low complexity. New approximations, thus, are of interest and warrant ongoing research.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Acknowledgments
The author is pleased to acknowledge the support of A. Zoubir, SPG, Technische Universität Darmstadt, Darmstadt, Germany, who hosted a visit where the fundamental results underpinning this paper were established.
Conflicts of Interest
The author declares no conflict of interest.
Appendix A. Proof of Theorem 1
Consider the function for the general case of , and the transformations
The definitions of and , according to , then lead to
It then follows that
when
From (A1) and (A2), it is the case that and it then follows, from the relationship , that
when , which is the first required result.
To establish the last stated result, consider the specific case of , , which defines the path
Along the path defined by , , and with , it is the case that
i.e., . Hence, with , it follows that , which is the last stated result. This result is also valid for the case of .
Appendix B. Restricted Domain Approximations for
Appendix B.1. Case 1: 0 < y << 1
For the case of , and consistent with the left graph shown in Figure 4, the root of that is of interest is close to, but left of, the known root of (see (21)). Consider , defined by (19), and the case of , i.e.,
With the form for of , it follows that:
Simplification, and a Taylor series expansion for the exponential function around the point zero, leads to:
First, second, and third order expansions for the exponential function lead to the approximations:
with solutions:
Consider the first non-zero solution for , which is the second order solution of . For the case of , this solution implies , which is consistent with the root .
The third order solution, which is consistent with as , is and leads to the approximation:
Hence:
after using the approximation
Appendix B.2. Case 2: y -> 1
For , Taylor series expansions around the point one yield the approximations:
Substitution of these approximations into
yields
As from below, the require root of (A18) becomes increasingly negative (this is evident from a comparison of the left and right hand graphs shown in Figure 4). For the case of , and negative, the term becomes vanishing small leading to
and the required result
Appendix C. Proof for First, Second, and Third Order Schröder Approximations
With , it follows, using the notation , that
It then follows, from Theorem 2, that the first order Schröder approximation is
assuming an initial approximating function for . The approximation for the case of is
Substitution for and , as specified by (18), yields:
Appendix C.1. Second Order
The second order Schröder approximation to , as defined by Theorem 2, is
and the approximation for the case of is
Substitution for and yields:
Appendix C.2. Third Order
The third order Schröder approximation to , as defined by Theorem 2, is
and the approximation for the case of is
Substitution for and yields the required result:
References
- Langevin, P. Sur la théorie du magnétisme. J. Phys. Theor. Appl. 1905, 4, 678–693. [Google Scholar] [CrossRef]
- Fiasconaro, A.; Falo, F. Analytical results of the extensible freely jointed chain model. Phys. A Stat. Mech.Appl. 2019, 532, 121929. [Google Scholar] [CrossRef]
- Iliafar, S.; Vezenov, D.; Jagota, A. Stretching of a Freely Jointed Chain in Two-Dimensions. arXiv 2013, arXiv:1305.5951. [Google Scholar]
- Itskov, M.; Dargazany, R.; Hornes, K. Taylor expansion of the inverse function with application to the Langevin function. Math. Mech. Solids 2012, 17, 693–701. [Google Scholar] [CrossRef]
- Nguessong, A.N.; Beda, T.; Peyraut, F. A new based error approach to approximate the inverse Langevin function. Rheol. Acta 2014, 53, 585–591. [Google Scholar] [CrossRef]
- Darabi, E.; Itskov, M. A simple and accurate approximation of the inverse Langevin function. Rheol. Acta 2015, 54, 455–459. [Google Scholar] [CrossRef]
- Jedynak, R. Approximation of the inverse Langevin function revisited. Rheol. Acta 2015, 54, 29–39. [Google Scholar] [CrossRef]
- Kröger, M. Simple, admissible, and accurate approximants of the inverse Langevin and Brillouin functions, relevant for strong polymer deformations and flows. J. Non-Newton. Fluid Mech. 2015, 223, 77–87. [Google Scholar] [CrossRef]
- Marchi, B.C.; Arruda, E.M. An error-minimizing approach to inverse Langevin approximations. Rheol. Acta 2015, 54, 887–902. [Google Scholar] [CrossRef]
- Rickaby, S.R.; Scott, N.H. A comparison of limited-stretch models of rubber elasticity. Int. J. Non-Linear Mech. 2015, 68, 71–86. [Google Scholar] [CrossRef]
- Petrosyan, R. Improved approximations for some polymer extension models. Rheol. Acta 2017, 56, 21–26. [Google Scholar] [CrossRef]
- Jedynak, R. A comprehensive study of the mathematical methods used to approximate the inverse Langevin function. Math. Mech. Solids 2018, 24, 1992–2016. [Google Scholar] [CrossRef]
- Marchi, B.C.; Arruda, E.M. Generalized error-minimizing, rational inverse Langevin approximations. Math. Mech. Solids 2019, 24, 1630–1647. [Google Scholar] [CrossRef]
- Howard, R.M. Analytical approximations for the inverse Langevin function via linearization, error approximation and iteration. Rheol. Acta 2020, 59, 521–544. [Google Scholar] [CrossRef]
- Mező, I.; Keady, G. Some physical applications of generalized Lambert functions. Eur. J. Phys. 2016, 37, 065802. [Google Scholar] [CrossRef]
- Mező, I. On the structure of the solution set of a generalized Euler–Lambert equation. J. Math. Anal. Appl. 2017, 455, 538–553. [Google Scholar] [CrossRef]
- Mező, I.; Baricz, Á. On the generalization of the Lambert W function. Trans. Am. Math. Soc. 2017, 369, 7917–7934. [Google Scholar] [CrossRef]
- Jamilla, C.; Mendoza, R.; Mező, I. Solutions of neutral delay differential equations using a generalized Lambert W function. Appl. Math. Comput. 2020, 382, 125334. [Google Scholar] [CrossRef]
- Petković, M.S.; Petković, L.D.; Herceg, Ð. On Schröder’s families of root-finding methods. J. Comput. Appl. Math. 2010, 233, 1755–1762. [Google Scholar] [CrossRef][Green Version]
- Dubeau, F. Polynomial and rational approximations and the link between Schröder’s processes of the first and second kind. Abstr. Appl. Anal. 2014, 2014, 719846. [Google Scholar] [CrossRef]
- Howard, R.M. Schröder based inverse function approximation. Axioms 2023, 12, 1042. [Google Scholar] [CrossRef]
- Corless, R.M.; Gonnet, G.H.; Hare, D.E.G.; Jeffrey, D.J.; Knuth, D.E. On the Lambert W function. Adv. Comput. Math. 1996, 5, 329–359. [Google Scholar] [CrossRef]
- Howard, R.M. Analytical Approximations for the Principal Branch of the Lambert W Function. Eur. J. Math. Anal. 2022, 2, 14. [Google Scholar] [CrossRef]
- Lóczi, L. Guaranteed-and high-precision evaluation of the Lambert W function. Appl. Math. Comput. 2022, 433, 127406. [Google Scholar]
- Schröder, E. Über unendlich viele Algorithmen zur Auflösung der Gleichungen. Math. Ann. 1870, 2, 317–365. [Google Scholar] [CrossRef]
- Berinde, V.; Takens, F. Iterative Approximation of Fixed Points; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Gdawiec, K.; Kotarski, W.; Lisowska, A. Polynomiography based on the nonstandard Newton-like root finding methods. Abstr. Appl. Anal. 2015, 2015, 797594. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).