
Study on Oscillatory and Undulatory Motion of Robotic Fish


Abstract
:1. Introduction
- –
- Utilize the equations of motion control (oscillation and undulation) for fluid dynamic calculations.
- –
- Develop the model’s shape and control the movement approach to aid in reaching the desired fish swimming at high speed.
2. Methodology
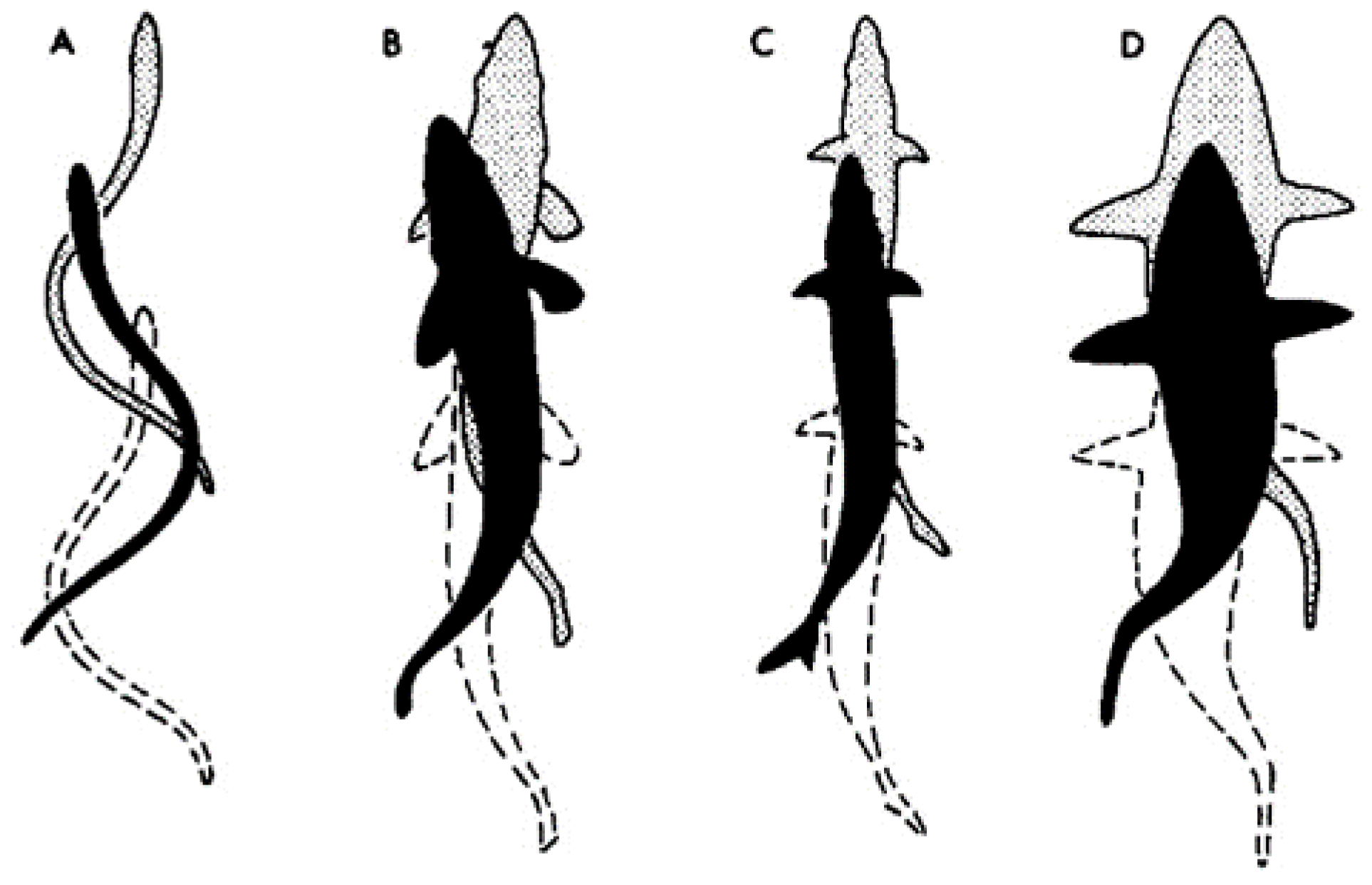
2.1. Swimming Styles
2.1.1. Oscillatory Motion
2.1.2. Undulatory Motion
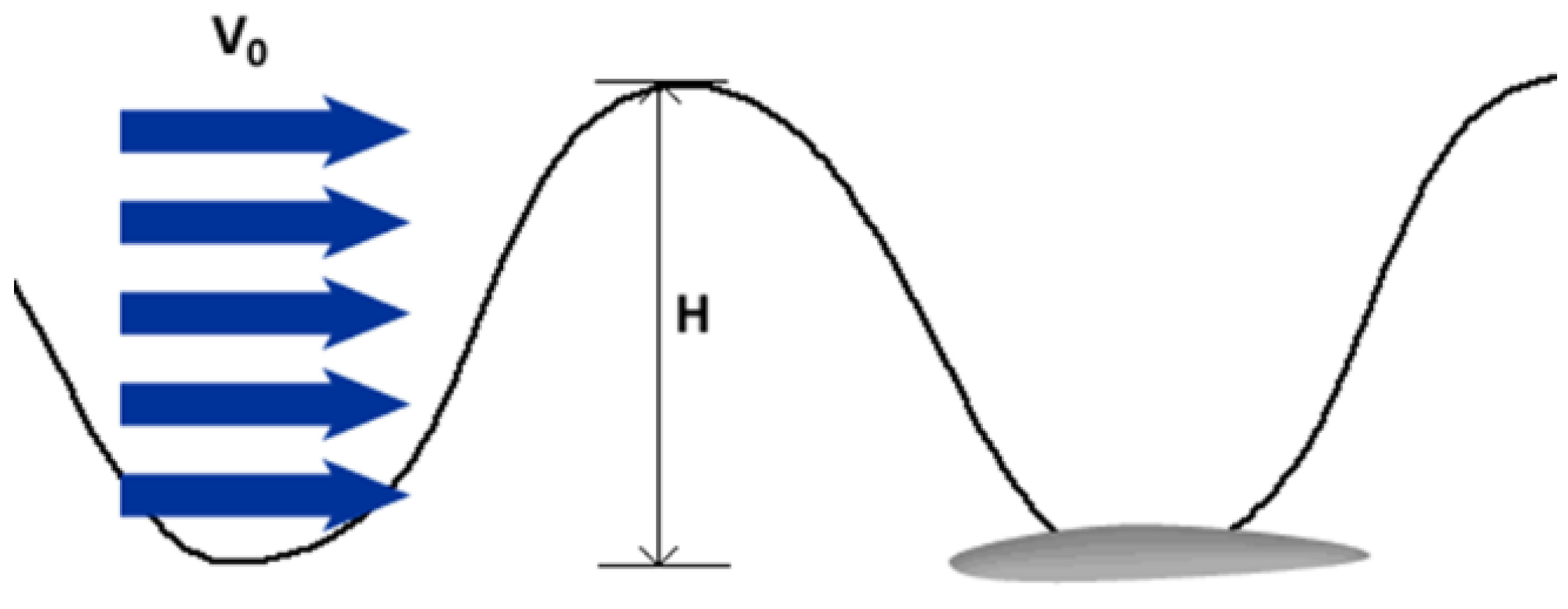
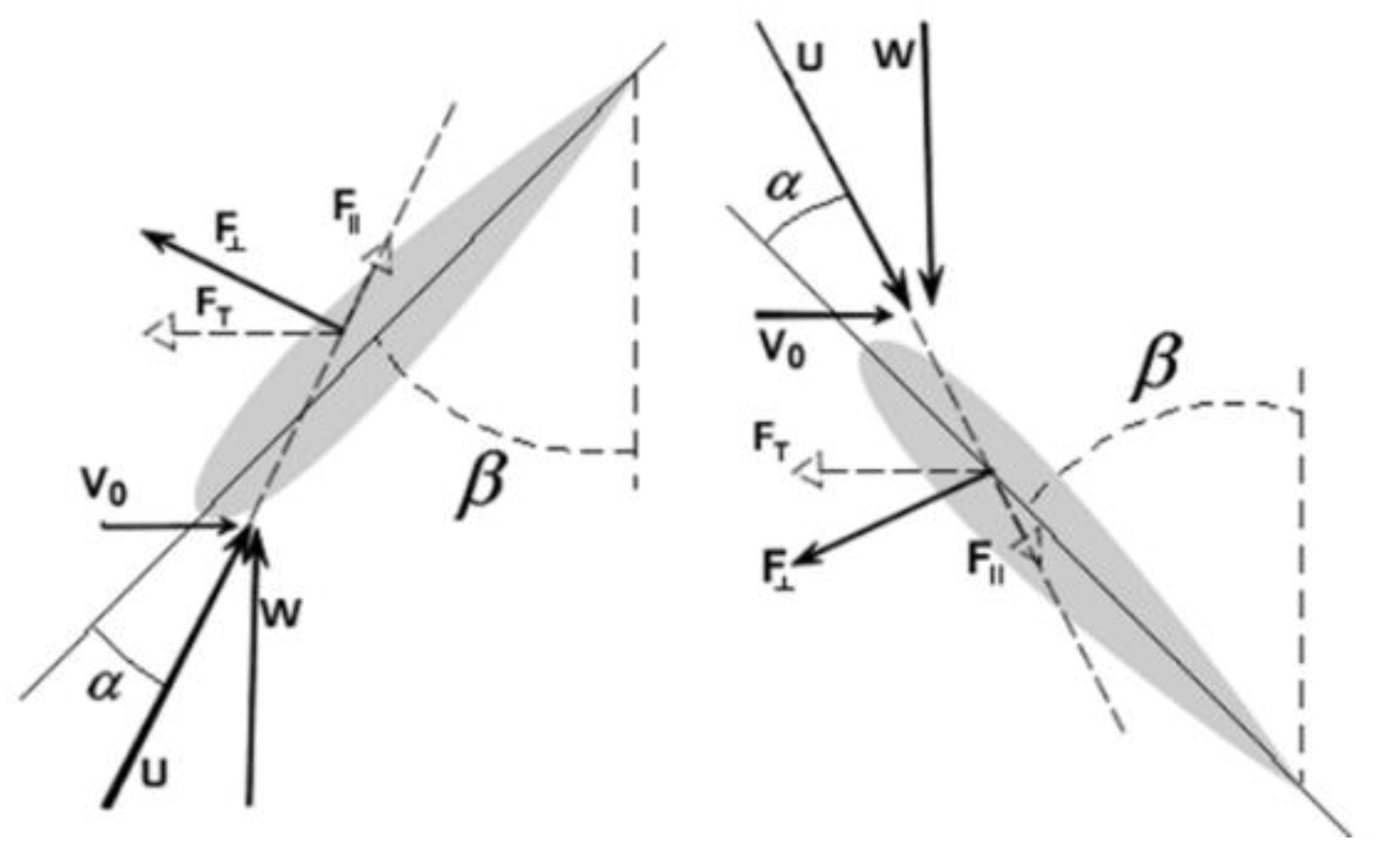
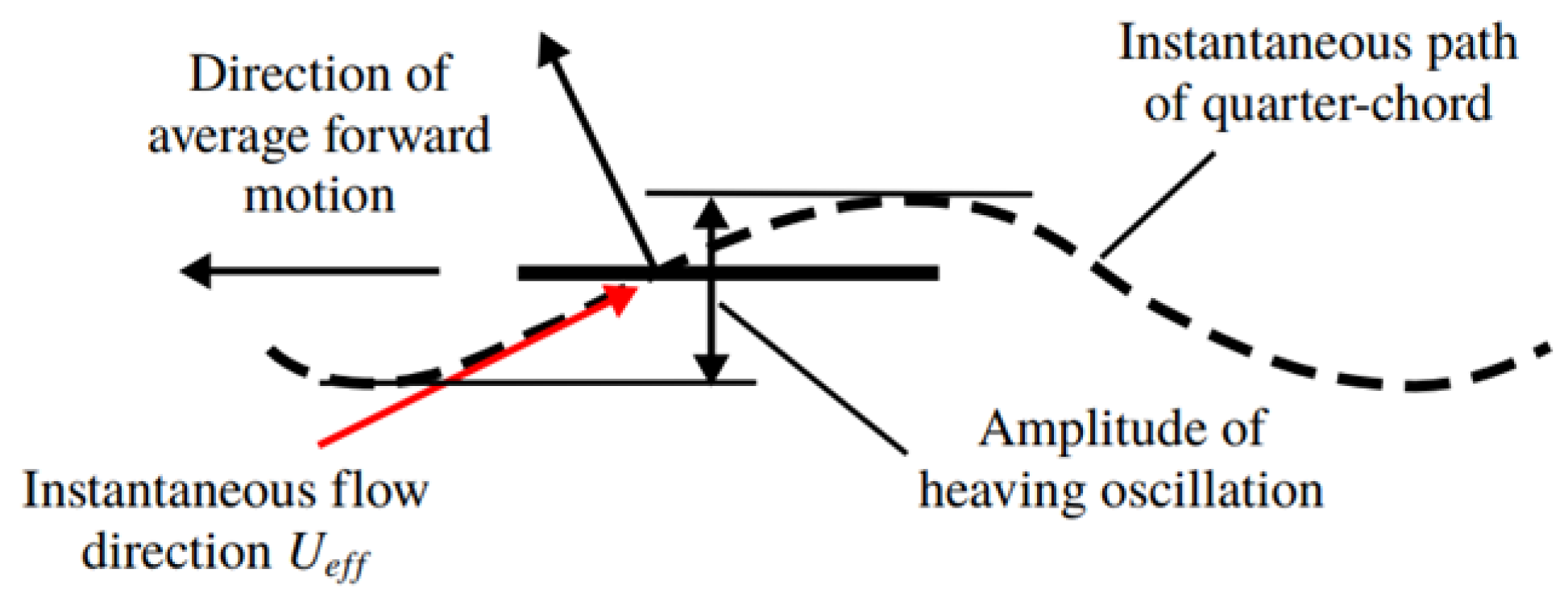
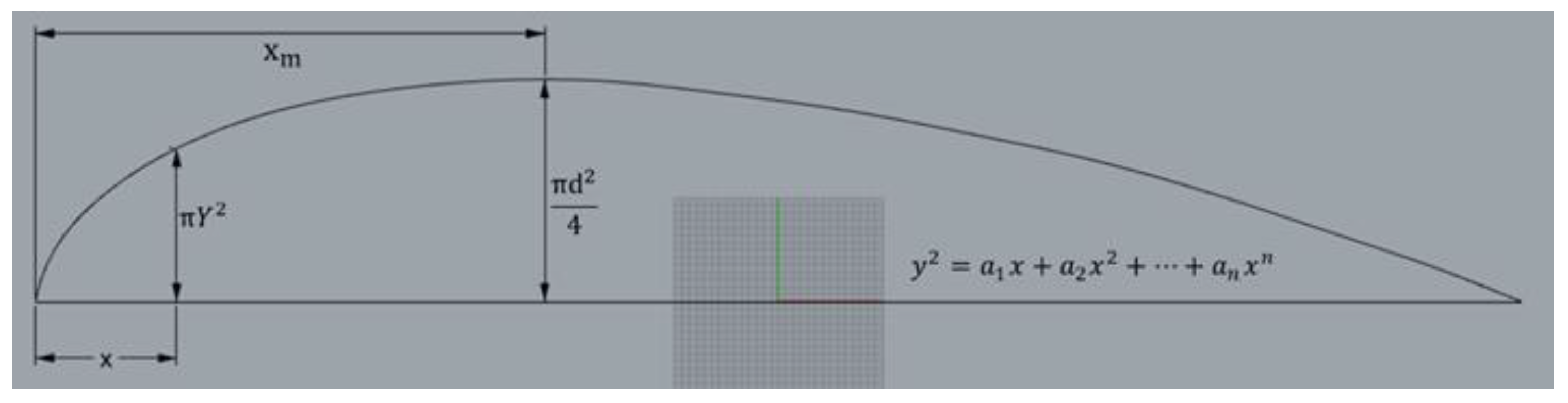
2.2. Mathematical Modeling
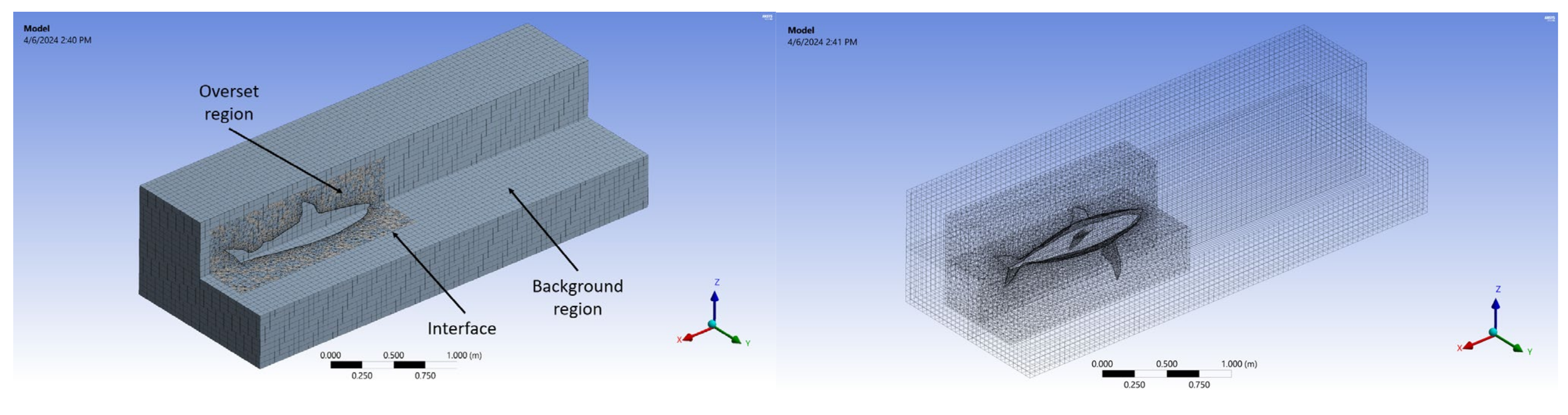
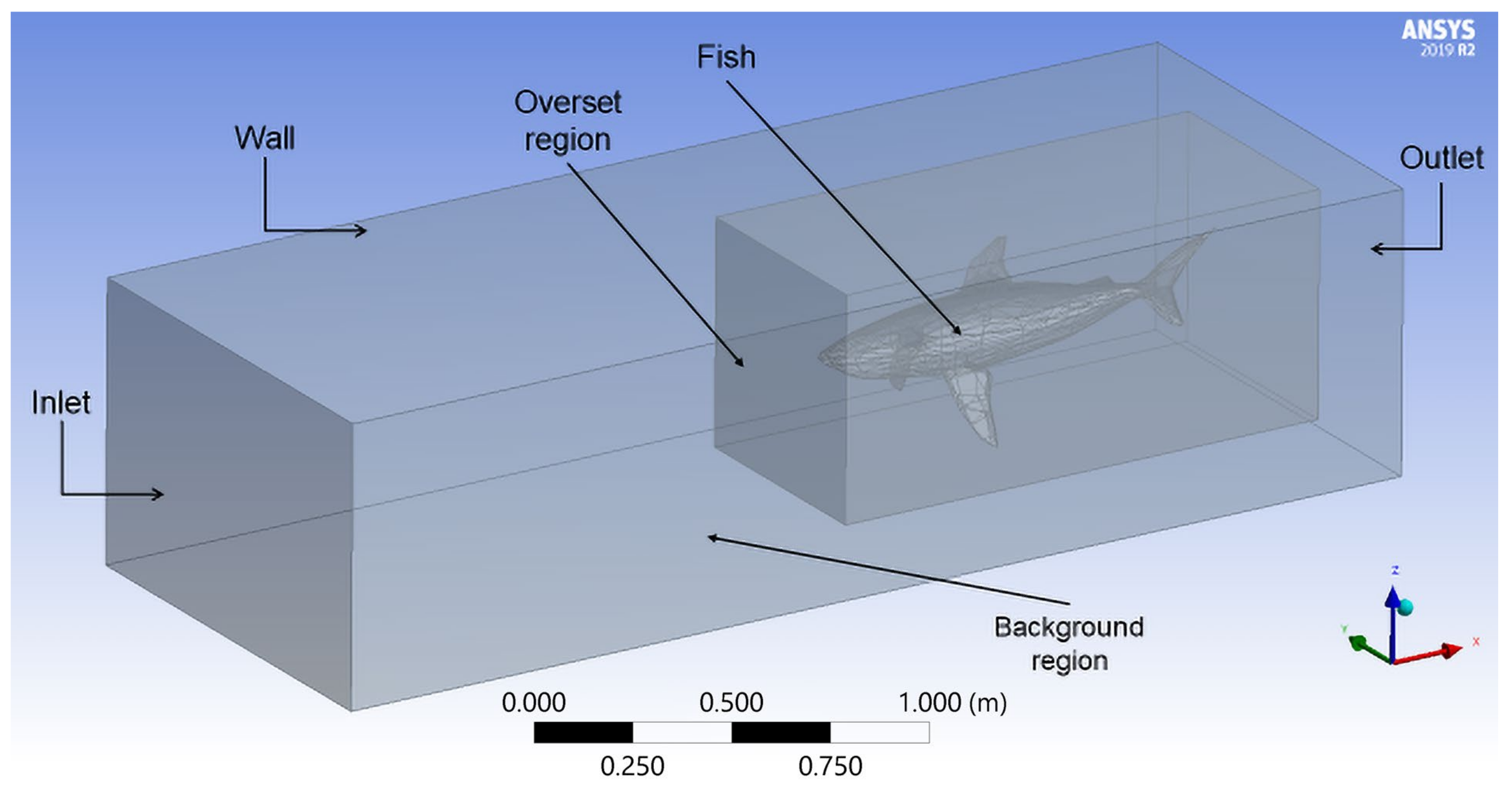
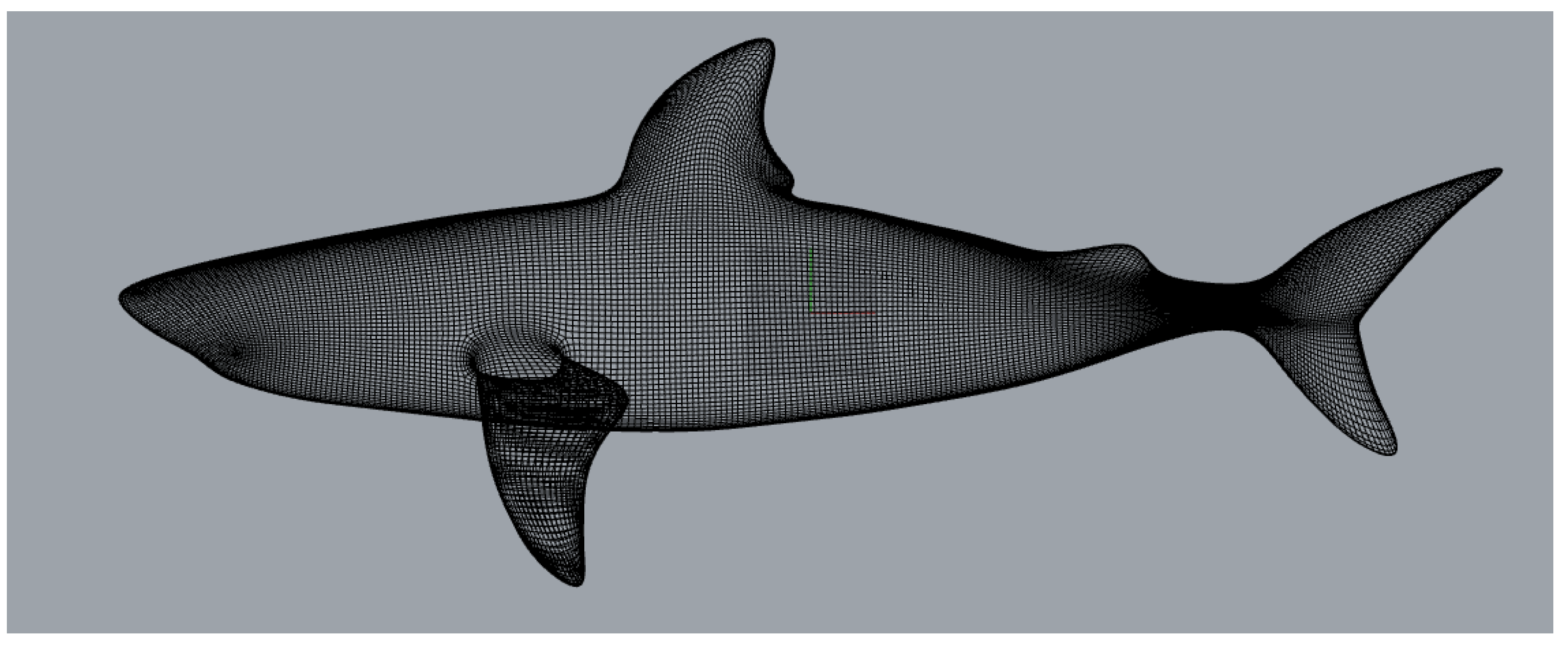
2.3. The Numerical Meshes and Boundary Conditions
3. Results and Discussion
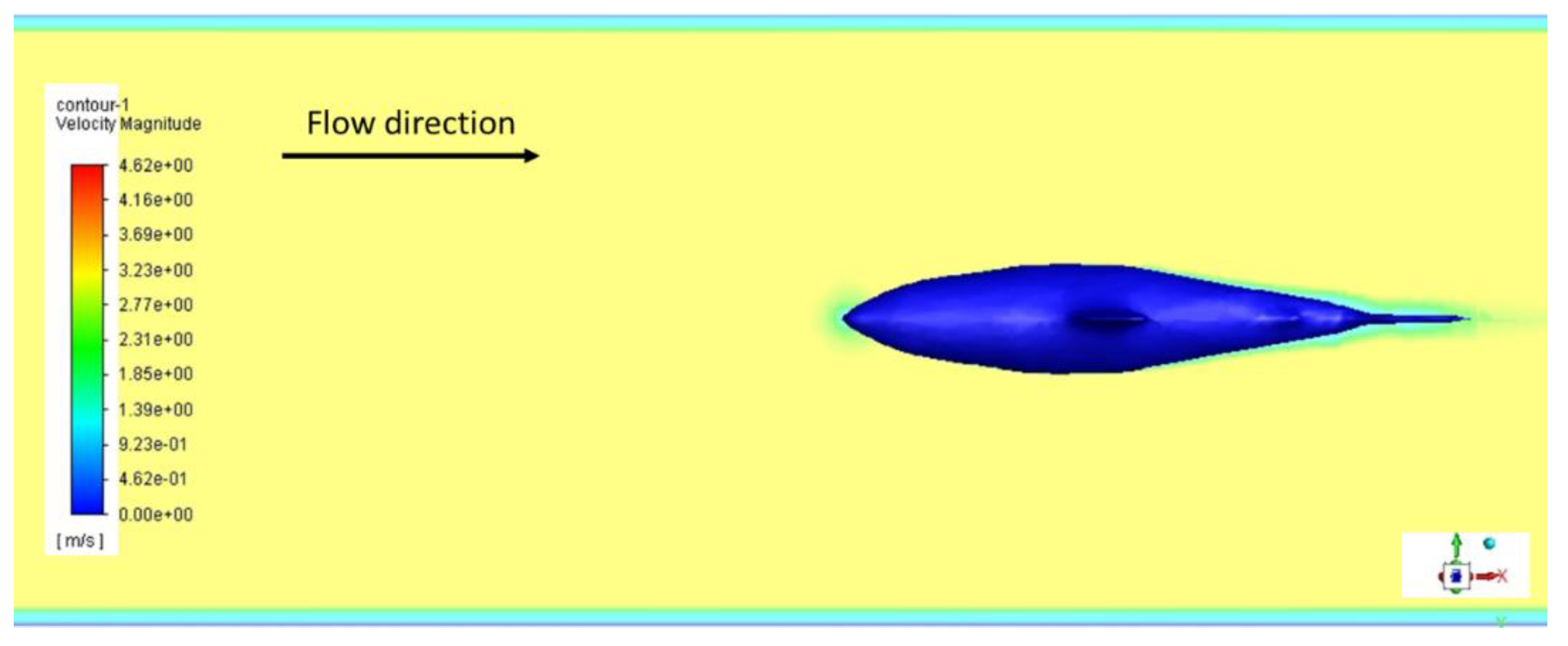
3.1. Robotic Fish with Different Base Dimension


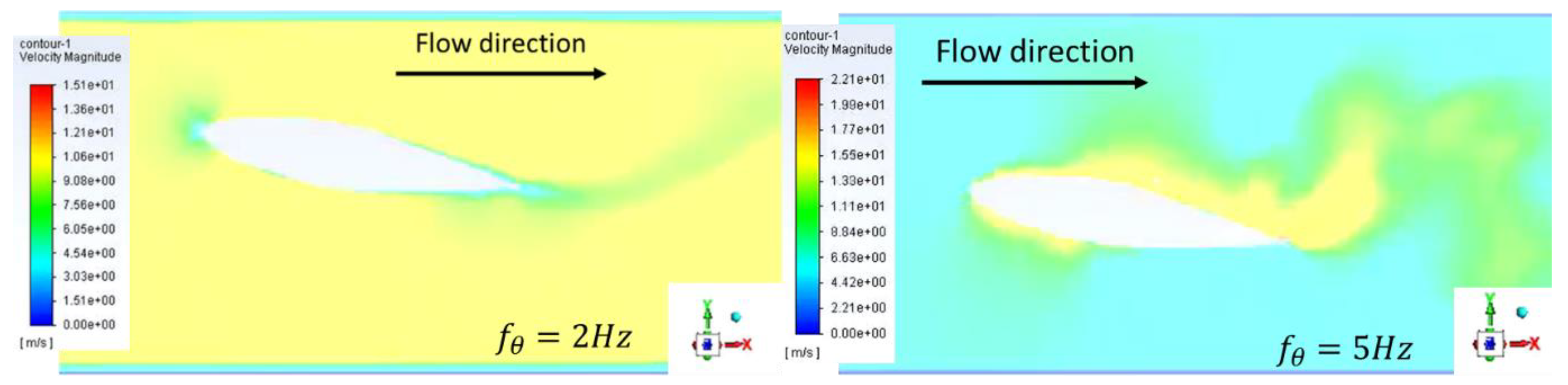
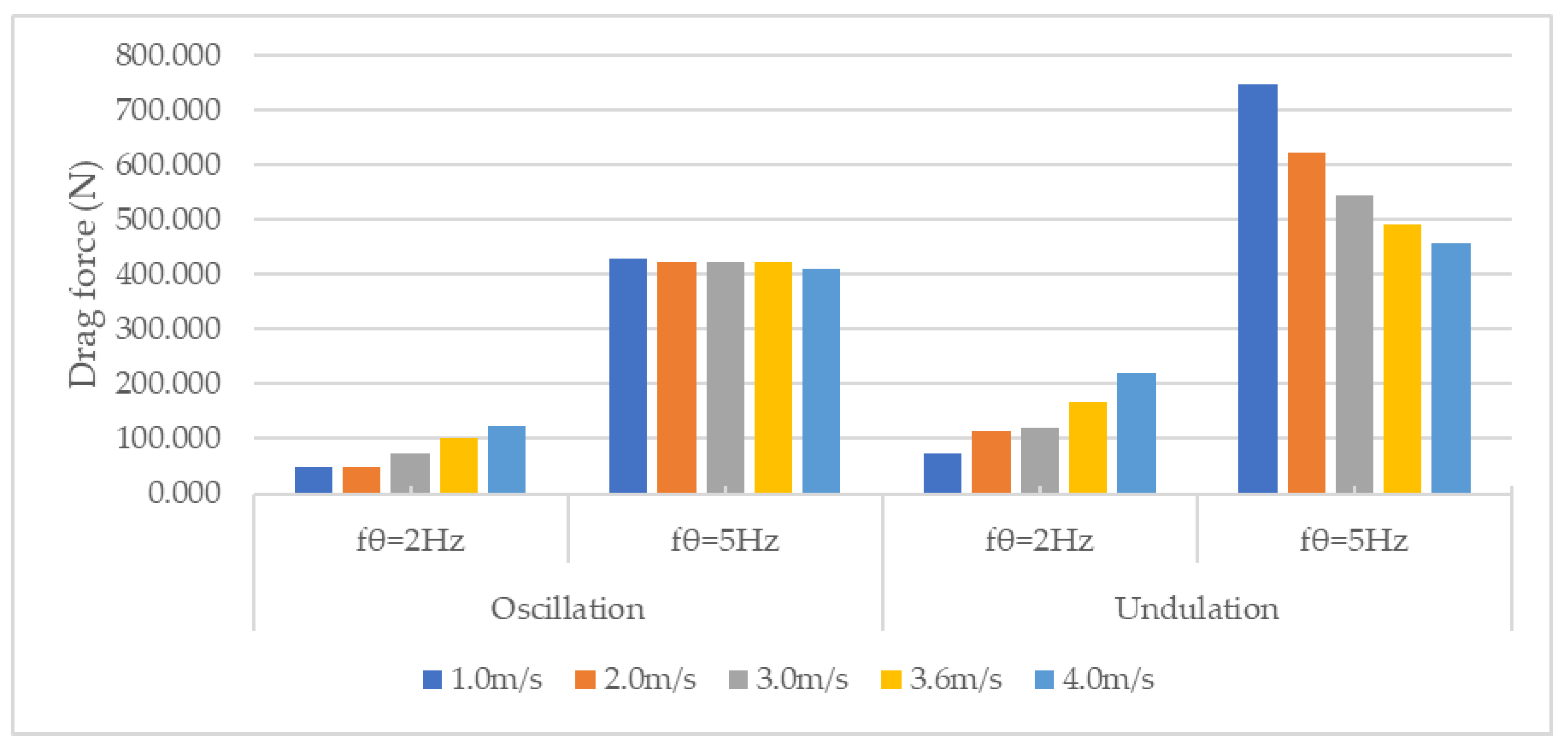
3.2. Robotic Fish with Oscillatory and Undulatory Motion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jackson, S. Argo: The first ship? Rhein. Mus. Philol. 1997, 140, 249–257. [Google Scholar]
- Yang, B.; Liu, Y.; Liao, J. Manned Submersibles—Deep-sea Scientific Research and Exploitation of Marine Resources. Bull. Chin. Acad. Sci. 2021, 36, 622–631. [Google Scholar]
- Williams, S.B.; Newman, P.; Rosenblatt, J.; Dissanayake, G.; Durrant-Whyte, H. Autonomous underwater navigation and control. Robotica 2001, 19, 481–496. [Google Scholar] [CrossRef]
- Kramer, B. Electroreception and Communication in Fishes; Gustav Fischer: Stuttgart, Germany, 1996; Volume 42. [Google Scholar]
- Soomro, A.M.; Memon, F.H.; Lee, J.W.; Ahmed, F.; Kim, K.H.; Kim, Y.S.; Choi, K.H. Fully 3D printed multi-material soft bio-inspired frog for underwater synchronous swimming. Int. J. Mech. Sci. 2021, 210, 106725. [Google Scholar] [CrossRef]
- Cohen, R.C.Z.; Cleary, P.W. Computational Studies of the Locomotion of Dolphins and Sharks Using Smoothed Particle Hydrodynamics. In Proceedings of the 6th World Congress of Biomechanics (WCB 2010), Singapore, 1–6 August 2010. [Google Scholar]
- Sun, K.; Cui, W.; Chen, C. Review of Underwater Sensing Technologies and Applications. Sensors 2021, 21, 7849. [Google Scholar] [CrossRef] [PubMed]
- Alexander, J. Smits, Undulatory and oscillatory swimming. J. Fluid Mech. 2019, 874, P1. [Google Scholar] [CrossRef]
- Alam, M.I.; Pant, R.S. Estimation of Volumetric Drag Coefficient of Two-Dimensional Body of Revolution. J. Aircr. 2019, 56, 5. [Google Scholar] [CrossRef]
- Nesteruk, I.; Passoni, G.; Redaelli, A. Shape of Aquatic Animals and Their Swimming Efficiency. J. Mar. Biol. 2014, 2014, 470715. [Google Scholar] [CrossRef]
- Muratoglu, A.; Yuce, M.I.; Eşit, M. Foil Generation Inspiring from Nature. In Proceedings of the International Conference on Natural Science and Engineering, ICNASE’16, Kilis, Turkey, 19–20 March 2016. [Google Scholar]
- Lighthill, M.J. Note on the swimming of slender fish. J. Fluid Mech. 1960, 9, 305–317. [Google Scholar] [CrossRef]
- ISO 9001:2008; ANSYS FLUENT 12.0 UDF Manual. ANSYS, Inc.: Canonsburg, PA, USA, 2009.
- Krueger, P.S. A Brief Introduction to Mechanical and Biological Propulsion. Available online: https://s2.smu.edu/propulsion/Pages/navigation.htm (accessed on 10 November 2023).
- Lauder, G.V.; Tytell, E.D. Hydrodynamics of Undulatory Propulsion, Fish Biomechanics. Fish Physiol. 2005, 23, 425–468. [Google Scholar]
- Li, N.; Liu, H.; Su, Y. Numerical study on the hydrodynamics of thunniform bio-inspired swimming under self-propulsion. PLoS ONE 2017, 12, e0174740. [Google Scholar] [CrossRef] [PubMed]
- Tay, C.M.J.; Khoo, B.C.; Chew, Y.T. Mechanics of drag reduction by shallow dimples in channel flow. Phys. Fluids 2015, 27, 035109. [Google Scholar] [CrossRef]
- Neveln, I.D.; Bale, R.; Bhalla, A.P.S.; Curet, O.M.; Patankar, N.A.; MacIver, M.A. Undulating fins produce off-axis thrust and flow structures. J. Exp. Biol. 2014, 217, 201–213. [Google Scholar] [CrossRef]
- Nesteruk, I. Drag Drop on High-Speed Supercavitating Vehicles and Supersonic Submarines. Appl. Hydromechnics 2015, 17, 52–57. [Google Scholar]
- Wu, T.Y. Fish Swimming and Bird/Insect Flight. Annu. Rev. Fluid Mech. 2011, 43, 25–58. [Google Scholar] [CrossRef]
- 7.5-02-02-02; ITTC 1957 Recommended Procedures and Guidelines. ITTC: Zürich, Switzerland, 2011.
- Journée, J.M.J.; Massie, W.W. Offshore Hydromechanics; Delft University of Technology: Delft, The Netherlands, 2001. [Google Scholar]
- Landweber, L.; Gertler, M. Mathematical Formulation of Bodies of Revolution; DTMB-719; David Taylor Model Basin: Washington, DC, USA, 1950. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Condition | Value |
|---|---|---|
| Inlet | Prescribed velocity | 1–4 m/s |
| Outlet | Prescribed pressure | Gauge pressure |
| Fish surface | Prescribed velocity | |
| Wall | No slip and smooth wall | |
| Overset region | Inner interior | |
| Background region | Outer interior | |
| Density of water | - | |
| Kinematic viscosity | - |
| Notation | Unit | Range | |
|---|---|---|---|
| m | 0.3–1.2 | The length | |
| m | 0.3 | The maximum diameter | |
| (Dimensionless) | 0–1 | The axial | |
| (Dimensionless) | 0–0.1 | The radius | |
| (Dimensionless) | 0.4 | The distance of the maximum section from the nose | |
| (Dimensionless) | 0.1 | The radius of curvature at the nose | |
| (Dimensionless) | 0.1 | The radius of curvature at the tail | |
| (Dimensionless) | The shape coefficients |
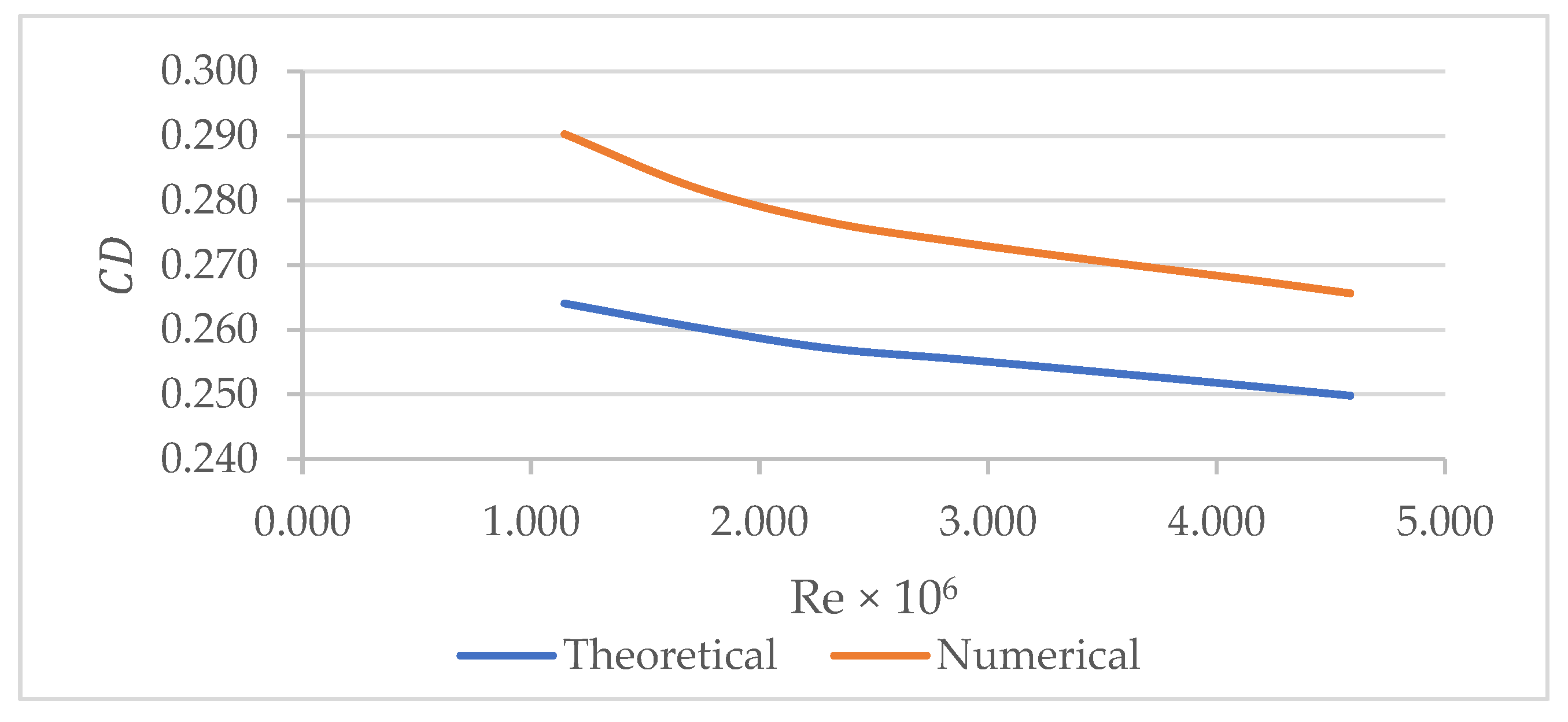
| U (m/s) | (−) | Theoretical | Numerical | Difference between Numerical and Theoretical (%) |
|---|---|---|---|---|
| 1.0 | 1.146 | 0.264 | 0.290 | 9.930 |
| 1.5 | 1.720 | 0.260 | 0.282 | 8.297 |
| 2.0 | 2.293 | 0.257 | 0.277 | 7.607 |
| 2.5 | 2.866 | 0.255 | 0.274 | 7.097 |
| 3.0 | 3.439 | 0.254 | 0.271 | 6.794 |
| 3.6 | 4.127 | 0.251 | 0.268 | 6.544 |
| 4.0 | 4.586 | 0.250 | 0.266 | 6.345 |
| Flow Velocity (m/s) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| St | Oscillation | Undulation | St | Oscillation | Undulation | |||||
| (N) | (N) | (N) | ||||||||
| 1.0 | 0.300 | 1.812 | 47.931 | 4.497 | 73.343 | 0.750 | 16.228 | 429.269 | 28.196 | 745.845 |
| 2.0 | 0.150 | 0.450 | 47.635 | 0.693 | 112.677 | 0.375 | 3.993 | 422.462 | 5.874 | 621.566 |
| 3.0 | 0.100 | 0.314 | 74.845 | 0.516 | 118.954 | 0.250 | 1.830 | 422.292 | 2.283 | 543.528 |
| 3.6 | 0.083 | 0.296 | 101.434 | 0.486 | 166.652 | 0.208 | 1.232 | 422.245 | 1.430 | 490.055 |
| 4.0 | 0.075 | 0.291 | 123.065 | 0.473 | 218.566 | 0.188 | 0.969 | 409.942 | 1.077 | 455.868 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nam Anh, P.H.; Choi, H.-S.; Huang, J.; Zhang, R.; Kim, J. Study on Oscillatory and Undulatory Motion of Robotic Fish. Appl. Sci. 2024, 14, 3239. https://doi.org/10.3390/app14083239
Nam Anh PH, Choi H-S, Huang J, Zhang R, Kim J. Study on Oscillatory and Undulatory Motion of Robotic Fish. Applied Sciences. 2024; 14(8):3239. https://doi.org/10.3390/app14083239
Chicago/Turabian StyleNam Anh, Phan Huy, Hyeung-Sik Choi, Jiafeng Huang, Ruochen Zhang, and Jihoon Kim. 2024. "Study on Oscillatory and Undulatory Motion of Robotic Fish" Applied Sciences 14, no. 8: 3239. https://doi.org/10.3390/app14083239