1. Introduction
In 1949, J. Bartels introduced the planetary
Kp index, derived from three-hourly
K indices specific to observatories [
1]. This planetary geomagnetic
K index assesses geomagnetic activity within three-hourly UTC (Coordinated Universal Time) intervals on a quasi-logarithmic scale from 0 to 9. This geomagnetic
Kp index quantifies disturbances in the Earth’s magnetic field caused by solar activity [
2]. The
Kp index is derived from observations of magnetic field variations at specific geomagnetic observatories around the world [
1]. These observations are used to calculate a single global index that represents the overall level of geomagnetic activity. The
Kp index is particularly useful for assessing the potential impact of space weather events, such as solar flares and coronal mass ejections, on Earth’s magnetosphere. Monitoring the
Kp index is important for space weather forecasting and for assessing the potential impacts on various technological systems on Earth. The
Kp index is then derived by combining the individual
K-values from different observatories. The overall
Kp index is a global measure of geomagnetic activity during a specific three-hour period.
Every day the 24 h
Kp index is calculated by summing the
Kp values over eight consecutive 3 h intervals. The
Kp index is calculated on a semi-logarithmic scale, while its counterpart is calculated on a linear scale and is known as the
Ap index. The daily sum of the
Ap index is calculated by summing the eight three-hour
Ap index values. This helps provide a smoother representation of the overall geomagnetic activity for a full day [
1]. It provides a daily measure of geomagnetic activity, and its values are related to the disturbance storm time (
Dst) index, which measures the globally averaged strength of the Earth’s geomagnetic field disturbance. The
Dst index was proposed by M. Sugiura in 1964 [
3] to measure the magnitude of the current that produces the axially symmetric disturbance field. It is derived from geomagnetic field variations in the
H component measured at four low-latitude stations. The development of the
Dst index was a significant step in understanding and monitoring space weather, as it allowed scientists to assess the impact of solar activity on the Earth’s magnetosphere. The
Dst index is widely used in space weather research and forecasting to characterize the severity of geomagnetic storms.
In the realm of space physics and geomagnetism, numerous indices such as Kp, Ap, and Dst are employed to assess and quantify the dynamic nature of the Earth’s magnetosphere in response to solar activity. However, when delving into the intricacies of local magnetic field variations, particularly those influenced by lunar waves, a more refined approach is necessary. In this context, the focus shifts from general indices averaged over the day to the development of a distinct index for each hour and the specific geographic locations where magnetometers are deployed. This approach aims to capture the complexity of the local magnetic field in real-time, allowing for a more detailed understanding of the interplay between lunar waves and geomagnetic activity at specific locations and temporal intervals. Fine-grained indices of this nature enhance our understanding of the intricate dynamics within the Earth’s magnetosphere and its interactions with celestial bodies such as the Moon.
Understanding the Earth’s magnetic field requires tracing its evolution over time and analyzing spatial variations. In [
4], the field history of the Earth is determined through the current polarization of crustal material, specifically clay-like sediments in unconsolidated water environments, offering a simple form of polarization for examination. Ref. [
5] enhances our understanding of the Earth system by investigating its internal dynamics and its impact on geospace, employing high-precision measurements of magnetic field characteristics, coupled with navigation, accelerometer, and electric field data. Measurement of local magnetic fields is crucial for diverse applications, including detecting anomalies in Earth’s main field, locating buried objects in oil and mineral exploration, and monitoring space weather. Magnetic observatories provide essential data for statistical studies on magnetic storms, tracking magnetic pole motions, and understanding the structure and dynamics of the Earth. In physics and astronomy, local magnetic field measurements help to study fundamental particles and their behavior in different environments, such as in plasma and the magnetic fields of stars [
5,
6,
7,
8,
9].
Recent studies, such as [
10], focus on understanding key aspects of Earth’s geomagnetic field, including the decay of the dipole moment, changes in the South Atlantic anomaly, and magnetic pole positions, all crucial for effective space weather prediction. Other studies [
11,
12], highlight advances in modeling the magnetospheric magnetic field, combining observational data with flexible models for a better understanding of Earth’s magnetic environment dynamics. The significance of magnetic field measurements from geosynchronous orbit is emphasized in [
13], contributing to space weather monitoring and enhancing our understanding of Earth’s magnetosphere and solar interactions. Furthermore, Refs. [
14,
15] discuss the importance of understanding Earth’s geomagnetic field and its response to external forces, highlighting the societal implications of space weather events. Finally, the study in [
16] employs the Space Weather Modeling Framework to simulate space weather events, demonstrating accurate reproduction of large-scale magnetic field variations and predicting plasma temperature and density close to measured means.
The GCMS (Global Coherence Monitoring System) is a global network of magnetometers measuring changes in the Earth’s magnetic field and monitoring Schumann resonances in the Earth–ionosphere cavity. It helps to study the Earth’s magnetic field and ionosphere, examining their response to solar activity and other influences [
17]. The effects of the Moon on Earth are mostly represented by tidal effects. Measurement of seawater height serves multiple purposes across various scientific disciplines, from oceanography to meteorology. It involves instant measurements contributing to the understanding and calculation of sea level changes, mean, lowest, and highest sea levels, tide amplitude, and phase. Various sensors, including tide gauges, GNSS (Global Navigation Satellite System), and satellite radar altimeters, contribute to global coverage and complement fixed point observations [
18]. The international organization The Global Sea Level Observing System (GLOSS), established in 1985, aims to provide standardized sea level data globally. GLOSS comprises around 300 sea level stations from 80 countries, observing large-scale sea level variations with global implications [
19].
The Moon’s influence on the Earth’s surface and tides are well known. However, the influence of the Moon on changes in the upper layers of the magnetosphere is less studied. Ref. [
20] explores the impact of lunar tides on various Earth systems, including the crust, oceans, atmosphere, and geomagnetic field. The research reveals new evidence of lunar-tide-induced signals in the plasmasphere, an inner region of the magnetosphere filled with cold plasma. By analyzing multi-satellite observations over four decades, the study identifies distinct diurnal and monthly periodicities in the plasmasphere’s boundary location, different from previously observed lunar tide effects. These findings highlight the significance of lunar tidal effects in plasma-dominated regions, influencing the understanding of the interactions of the Moon, atmosphere, and magnetosphere system through gravity and electromagnetic forces. The results may also have implications for tidal interactions in celestial systems with two bodies.
The main objective of this paper is to provide a reliable statistical proof that the influence of the Moon can also be observed in the Global Coherence Monitoring Network. The paper is structured as follows. An overview of the different techniques used in this study is described in
Section 2. The algebraic complexity of the magnetic field data is presented in
Section 3.
Section 4 presents the statistical results of the data. The algebraic complexity of tidal effects is presented in
Section 5. Conclusions follow in
Section 6.
5. Tidal Effects on the Local Magnetometers
5.1. Tidal Wave Complexity Index (TWCI)
Data representing tidal wave measurements can be retrieved from the University of Hawaii, Sea Level Center website [
48]. The data of the tidal waves (hourly sea level measured in millimeters) are collected from stations located at the closest meridians compared to the magnetometers. The data covers the period from 28 February 2015 to 11 March 2015, matching the timeframe of the magnetic field investigation. The selected measurement stations include Easter Island, Chile (−27.15000, −109.44800); Hanimaadhoo, Maldives (6.76700, 73.17300); Dzaoudzi, France (−12.78200, 45.25800); San Francisco, CA, USA (37.80700, −122.46500); and Honningsvag, Norway (70.98300, 25.98300) (
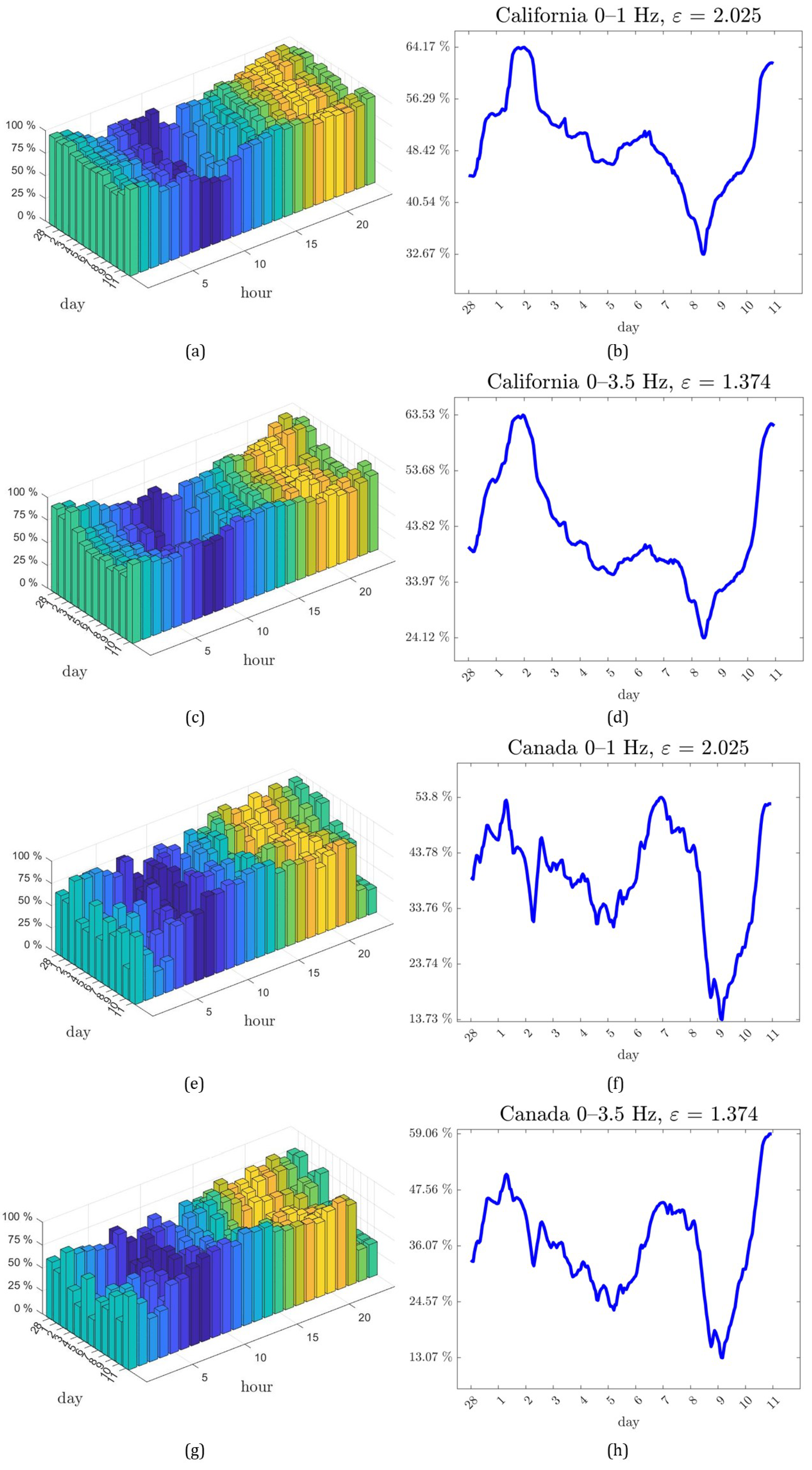
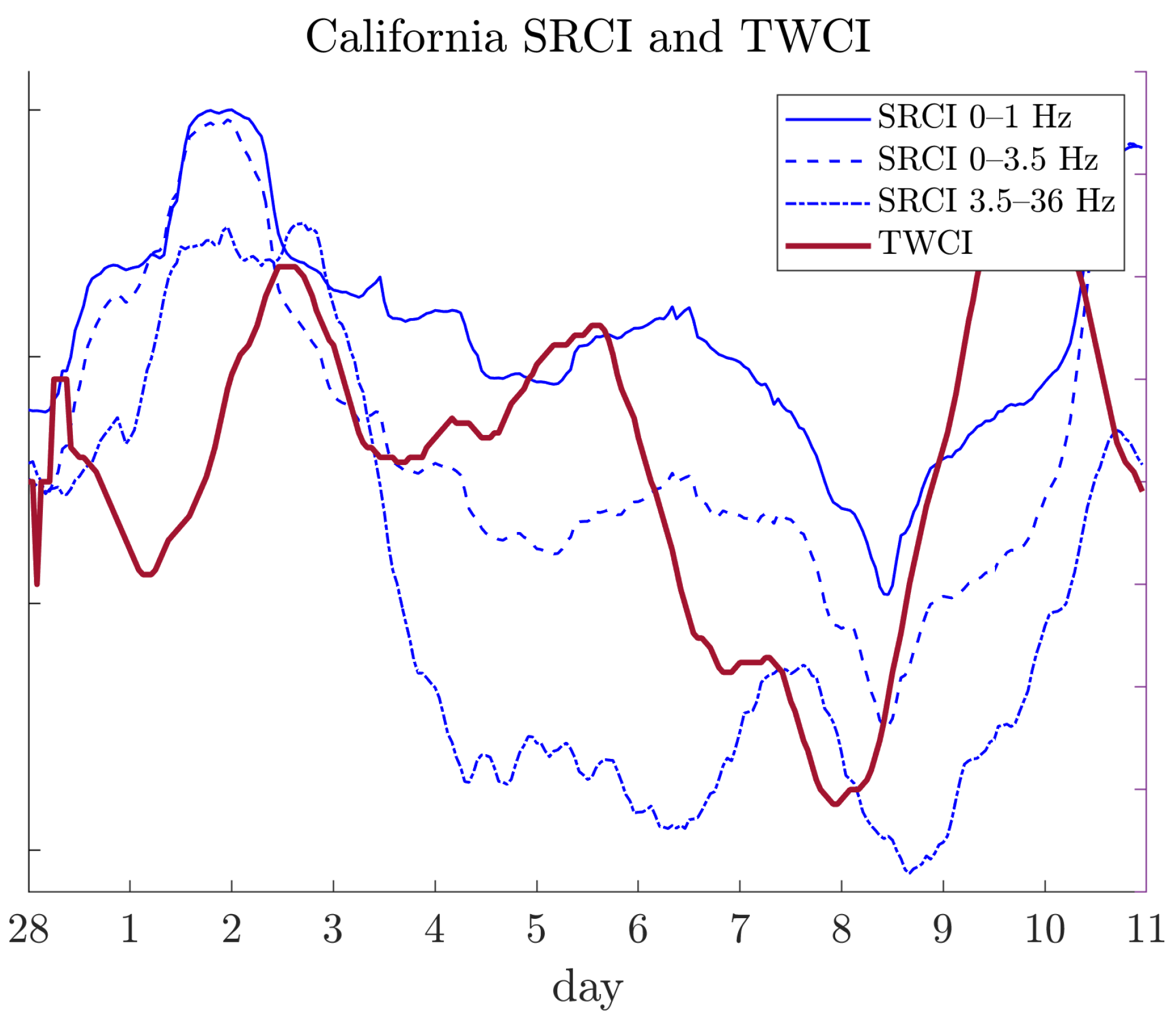
Table 7). Note that the oceanic water movements do not have a strong impact on the measurement of SRA because all magnetometers of the Global Coherence Monitoring System are located far from the shoreline. An example of the computed results is shown in
Figure 12. Note that there is an observable phase difference between the SRCI and TWCI signals in
Figure 12. However, we use statistical formulae, not visual comparisons, between plotted signals to derive correlations between signals. The explanation of this phase difference in
Figure 12 goes beyond the objectives of this study.
As defined in the previous section, magnetic field data are represented by the SRCI index. To maintain consistency in the comparison between magnetic field and tidal wave data, we introduce the Tidal Wave Complexity Index (TWCI). The computation methodology for the TWCI remains the same as that presented for the SRCI in previous sections.
The size of the Hankel matrix used to embed the tidal wave data is set to 24 × 24 due to the hourly sea level measurements. H-rank computations are performed in overlapping observation windows (the width of the window is set to 48 data points). Computations continue until the last data point in the two-week observation period is reached. Note that the calibration of
is performed once for the first 48 iterations. The strategy for the calibration of the threshold parameter
remains the same as for the SRCI. The aim is to choose such a value of
that the average TWCI would be exactly equal to 50%. The calibrated threshold parameter
for each location of the tidal wave is presented in
Table 8.
Then, the complexity index characterizing the algebraic complexity of the investigated time series is computed as the arithmetic average of all H-ranks computed on the current day (which automatically eliminates the diel cycle). As previously, the threshold is not recalibrated for the subsequent days. Those complexity index values are named as the Tidal Wave Complexity Index (TWCI).
An example of the computed SRCI and TWCI is shown in
Figure 12.
5.2. Statistical Analysis
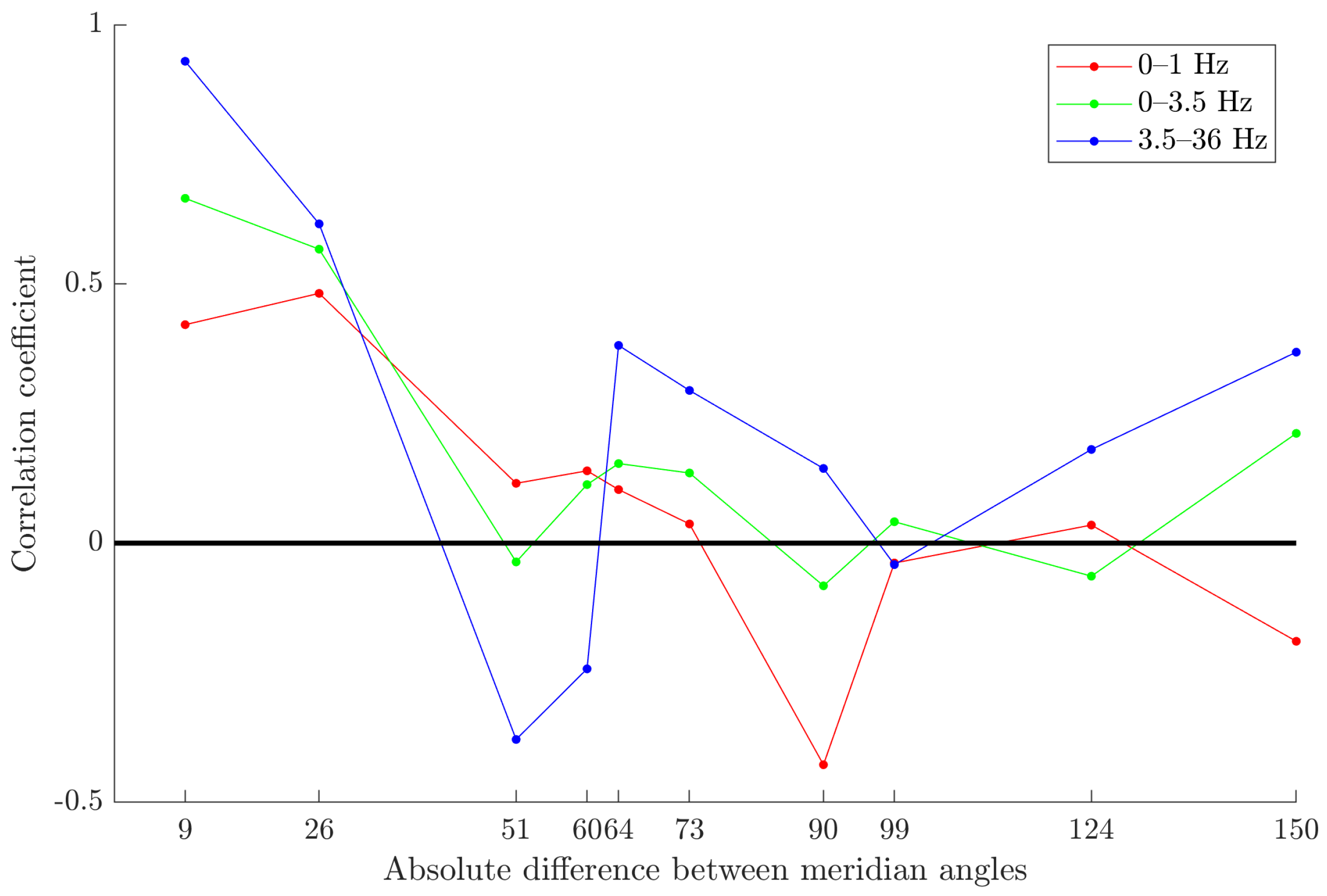
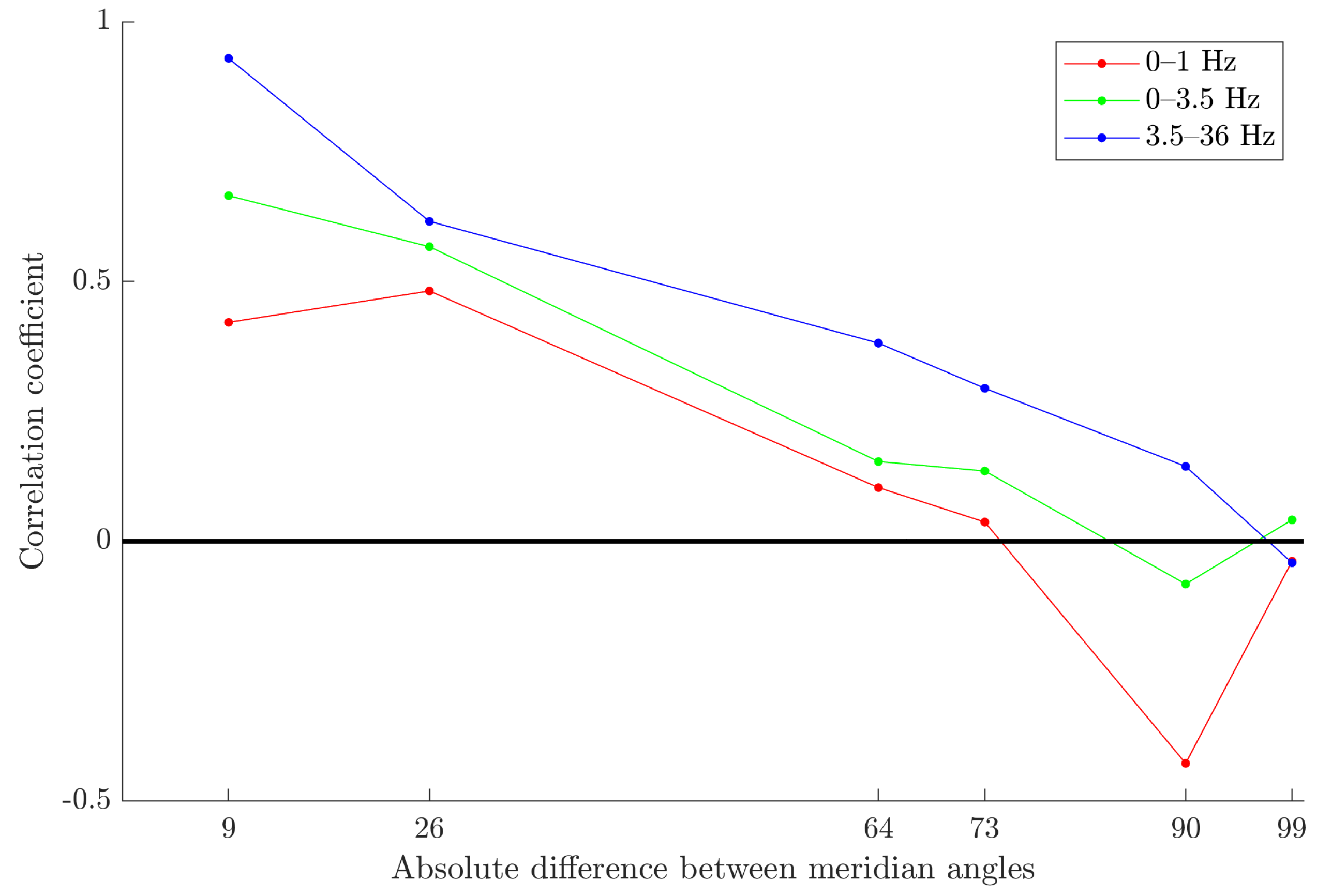
A statistical analysis is performed to confirm or deny the proposed hypothesis that the correlation between local magnetic fields (with the eliminated diel cycle) measured at different locations around the world depends on the absolute difference between the meridian coordinates of those locations (Hypothesis 1) and that the SRCI correlates with the TWCI (Hypothesis 2).
We define the following statistical variables: —SRCI of the ith region in the 0–1 Hz range, —SRCI of the ith region in the 0–3.5 Hz range, —SRCI of the ith region in the 3.5–36 Hz range, —TWCI of the ith region.
Pearson’s linear correlation and Spearman’s rank correlation coefficients are commonly used in the study of the correlation relationship in statistics. Pearson’s coefficient is applied when the data are normal. If the condition of normality of the variables is not satisfied or the data are sparse, Spearman’s rank coefficient is applied.
We check whether the normality condition is satisfied. Applying the chi-square test with a significance level of
, we test the following hypotheses:
here
—parameter estimates found by the maximum likelihood method.
Since in all cases the
p-value is lower than the selected level of significance (
Table 9), the hypotheses of the normality of variables
are rejected.
As the normality condition is not satisfied, we will apply Spearman’s rank correlation coefficient. Suppose we have pairs of variables
and observations
. We arrange the observations
and
separately. Let
be the rank of observation
. Then, the Spearman’s rank correlation coefficient is given by
We calculate the Spearman’s correlation coefficient between the variables in each region (
Table 10 represents the Spearman’s correlation coefficients in California,
Table 11 the coefficients in Canada,
Table 12 those in Lithuania,
Table 13 those in Saudi Arabia, and
Table 14 the coefficients in New Zealand).
The results obtained suggest that the correlation between pairs of variables , in each region is strong or very strong, with the exception of the Canadian region, where the pair exhibits a moderate strength of connection. However, it should be noted that in each region between variables and variable there is a very weak or non-existent relationship.
To determine the statistical significance of the values of the correlation coefficients obtained, we subject the results to hypothesis testing. We test the following hypotheses:
where
.
The following statistical measure is used to test the hypothesis:
When the null hypothesis
is true, the distribution of the statistic
follows a Student’s t-distribution with
degrees of freedom. Therefore, the
p-value for the applied criterion is calculated as follows:
where
T is a random variable distributed according to the Student’s t-distribution with
degrees of freedom.
We select the significance level to evaluate each hypothesis. The p-value for each hypothesis is then calculated. If the p-value is less than or equal to we reject the null hypothesis, indicating a statistically significant result. Conversely, if the p-value is greater than , we fail to reject the null hypothesis, suggesting a lack of statistical significance.
Table 15 indicates that, for the regions of the USA, Canada, Lithuania, and Saudi Arabia, the Spearman’s rank correlation coefficients are significantly different from zero. This implies that the null hypotheses
, which assert that the quantities are not correlated, are rejected in these cases. In the case of New Zealand, it should be noted that the hypotheses of the non-correlation between the quantities
and
,
and
cannot be rejected. This outcome is likely due to the fact that the values of the Spearman’s rank correlation coefficient are close to 0.
6. Concluding Remarks
As a result of the research presented in this article, we introduced the Schumann Resonance Complexity Index (SRCI). This is a new complexity measure designed for the measurement of algebraic complexity in magnetometers within the Global Coherence Network. This result is particularly interesting, as it fundamentally differs from all other measures of magnetic field complexity, such as the Kp index and other indices that globally represent the properties of the Earth’s magnetic field.
On further analysis, we observed that the elimination of diel cycles from the SRCI data yields interesting results. It appears that the correlations between different magnetometers are strongly related to the meridian angles: the smaller the difference in absolute values between the meridian angles, the larger the correlation between different magnetometers. No such similarities would be noticed when analyzing the raw magnetic field signals alone. This is the second result of this article, allowing the exploration of connections between different magnetometers.
This similarity immediately gives rise to a series of hypotheses. The first hypothesis suggests that if meridians play a significant role in the similarity between different magnetometers, it should be related to the influence of the Moon. However, since the magnetic field is measured locally at specific geographic locations, our intention was to evaluate the local tidal effects caused by the Moon. Fortunately, the existence of the global network of tidal waves (significantly larger than the global network of magnetometers) makes this task possible. The selection of the tidal wave monitoring station for each individual magnetometer was based on proximity. However, the geographical proximity was not the only important factor—the meridian proximity was taken into consideration because of the raised hypothesis.
Note that we did not directly measure correlations between the SRCI data and the tidal wave data. In principle, the signals are entirely different: the sampling rate of the magnetic field is 130 Hz, whereas tidal waves constitute one measurement per hour. Despite this, we introduce an identical complexity measure for tidal waves: the Tidal Wave Complexity Index (TWCI).
Having two indices, the Schumann Resonance Complexity Index (SRCI) and the Tidal Wave Complexity Index (TWCI), makes it possible to statistically and reliably explore possible connections. The statistical analysis yields truly intriguing results. And though the New Zealand magnetometer falls out of the rule, all the remaining magnetometers appear to be significantly correlated to the tidal effects. Thus, the main result of this article is the demonstration of the fact that the influence of the Moon (usually observed through tidal waves) affects the readings of the local magnetic field data recorded by the global network of magnetometers. Although this is the first demonstration of such an effect, in principle it is not astonishing. It is well known that tidal effects induced by the Moon affect not only water tides but also crustal displacements and the magnetosphere of the Earth. Naturally, one could expect that the same effects will also manifest in the local magnetic field. This study confirms this fact.
7. Discussion and Limitations
Possibly, the elimination of the diel cycle removes not only Sq variations (over a 24 h period) from the magnetic data, but also some part of the 12 h interval, which is close to the period of the lunar tidal wave. Therefore, emphasizing the lunar effect in magnetic variations is very difficult.
The five magnetic stations are located across the Earth, starting from Alberta, Northern Canada, to Baisiogala, Lithuania, Eastern Europe, close to subauroral latitudes. In this case, latitudinal and longitudinal magnetic variations due to lunar tidal waves can also be discussed.
There are several studies exploring the varying influences of high-latitude electric fields and atmospheric waves on daily fluctuations of ionospheric currents [
49], studying the seasonal longitudinal climatology of semi-diurnal lunar tidal variation in the equatorial electrojet [
50], describing the semi-diurnal lunar tidal influence on neutral winds, plasma velocities, and atomic oxygen airglow [
51], and exploring semi-diurnal tidal variations and their effects on the ionosphere–thermosphere–mesosphere system [
52].
This work focuses exclusively on the coordinates of the meridian and delves into the essence of tidal waves. Although other aspects, such as different coordinates and types of waves, could be explored, they remain beyond the scope of this study. These areas could serve as subjects for future research efforts, extending the understanding of tidal phenomena and local magnetic field in diverse contexts.
It is well established that the Moon influences the global and local magnetic field of the Earth, a fact confirmed and demonstrated through detailed studies performed not with data from five magnetometers scattered around the world but with data from dozens of magnetometers belonging to regular (and officially recognized by the scientific community) geomagnetic observatories covering our planet in latitude and longitude. Although the results discussed herein are based on the analysis of limited data over time and from few observation sites, the statistical treatment of the presented data is undoubtedly correct and appropriate. Geomagnetic conditions were not considered or characterized in this study, but could be a topic for further research.
An area for potential improvement in the study lies in the comparison of data between local magnetic field measurement sites and nearby tidal wave measurement stations, rather than prioritizing comparison based on geomagnetic proximity. It should be noted that the global dipolar magnetic field establishes geomagnetic coordinates, a crucial reference system for understanding conjugate effects between distinct points on Earth’s surface.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}