1. Introduction
Due to the accelerated population growth in recent decades, the construction of cities, towns, and related infrastructures is essential for the adequate interaction of social, well-being, political, and economic activities in every nation around the world [
1,
2,
3]. One of the most critical and expensive infrastructures that allows communication between different regions are bridges, which tend to deteriorate and accumulate diverse types of damage, produced by different environmental and human factors [
4,
5,
6]. Therefore, damage to bridges, as in any civil structure, is inherent; however, those constructions can provide many years of surface with adequate maintenance programs and appropriate damage identification processes [
7,
8,
9]. Thus, a periodical monitoring of civil structures called structural health monitoring (SHM) is fundamental for preserving the service life of bridges, and avoiding tragic accidents resulting from damage not being detected in time [
10,
11].
The global monitoring of bridges offers vital information regarding the serviceability and general integrity of the bridges; however, ensuring safety and continuous service depends on the methodology applied to identify damage in all of the critical elements in a timely, accurate, and efficient manner, as well as on the capacity to monitor the damage propagation and the decisions made to correct the structural defects without significantly affecting the operation of these structures. Bridge diagnosis comprises two levels being included in a damage identification process: the detection and localization of damage. As its name indicates, the damage detection alerts us about the existence of damage in the inspected structure, while the damage localization determines the position of the defects on the structure [
12]. Failure to detect damage to bridges in a timely manner can cause collapses with tragic consequences. In this regard, an example of this kind of accident happening in the current century is the Entre-os-Rios tragedy, which was a disaster that occurred on 4 March 2001 in Porto Portugal, where the fourth pillar of the Hintze Ribeiro Bridge, which connected the towns of Castelo de Paiva and Eja over the Duero River, had suffered damage that was not detected in time, causing the collapse of two sections of the road and the death of 59 people in vehicles [
13].
Similar to the bridge collapse described above, many catastrophic accidents have occurred due to failures, deteriorations, or the accumulation of damage in different elements of bridges, causing the collapse of entire structures and therefore devastating human deaths and substantial economic losses [
14,
15,
16,
17]. Historically, the damage identification process has been performed to visually monitor the condition of bridges. However, some important limitations of this process are a lack of regular monitoring, inspection-dependent monitoring, a delay in defect detection, and an inability to determine damage growth stages [
18]. As an alternative to visual monitoring, systems based on SHM are used. In a typical SHM of bridges, sensors are dispersed throughout the structure, and the collected data are used to analyze the condition of the bridge [
19,
20,
21]. Different parameters can be used to evaluate structures using SHM systems, such as corrosion, cracking, displacement, fatigue, settlement, deformation, temperature, inclination, vibration, water level, etc. [
22]. Therefore, it is of vital importance to develop and implement reliable and low-cost methods for the detection and location of non-visible damage in bridges. In recent years, to address the need to safeguard the structural integrity of bridges, SHM systems have been developed worldwide, and different analysis methods for the detection, location, and evaluation of damage in bridges are being investigated.
In recent decades, SHM techniques, based on the analysis and post-processing of the vibration responses of bridges, have become the most promising alternatives used to efficiently detect, locate, and evaluate the severity of damage in this type of civil structure, guaranteeing its integrity and predicting its useful life [
23,
24]. Thus, vibration-based methods for identifying damage in structures subjected to moving loads, such as bridges, can be broadly classified into parametric and non-parametric methods [
25]. Parametric methods work with data in the modal domain [
26,
27,
28,
29,
30,
31]. On the other hand, non-parametric methods use data in the time or frequency domain; these include wavelet theory [
32,
33,
34,
35], empirical mode decomposition [
36,
37,
38], time series analysis [
39,
40,
41], multiple signal classification [
42,
43], entropy [
44,
45,
46,
47], neural networks [
48,
49,
50], fractals [
51,
52], principal component analysis [
53,
54,
55,
56], etc.
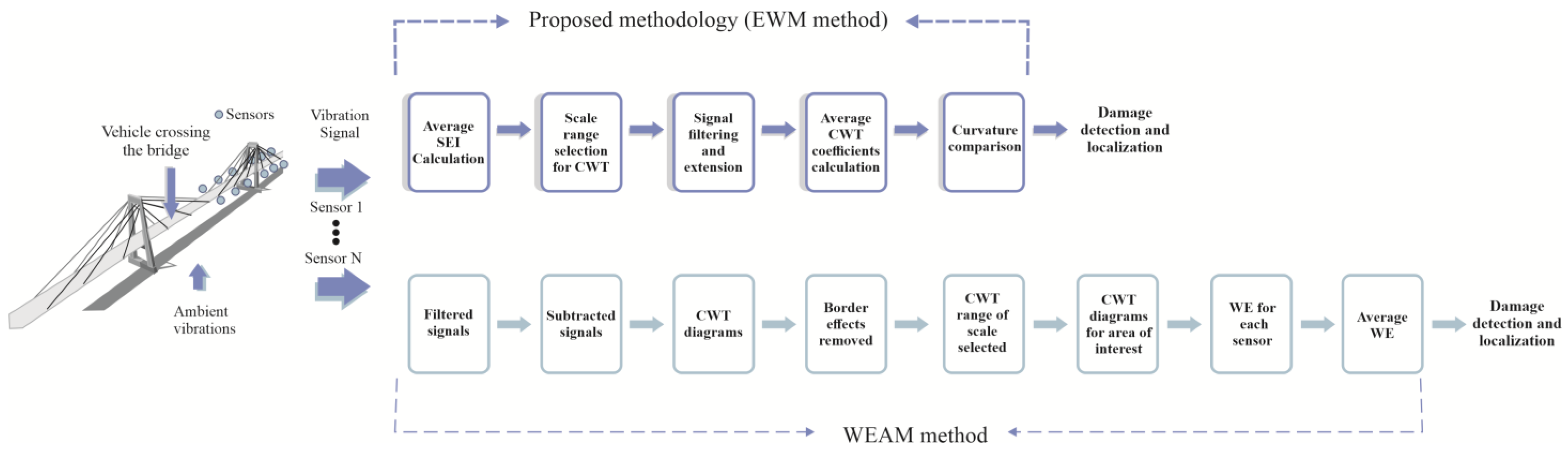
In particular, the wavelet energy accumulation method (WEAM) is a non-parametric method, previously developed in [
1], with the objective of detecting and locating damage in vehicular bridges. This method overcomes the limitations of the parametric methods, and provides additional advantages from the previously developed non-parametric methods. Despite the advantages of WEAM, which include its ability to detect and locate diverse types of damage in bridges with high precision, in different locations, and of various severities via the use of a few sensors distributed on the bridge deck, its main disadvantages are that it involves a significant number of stages, as well as the requirement of a high computing time.
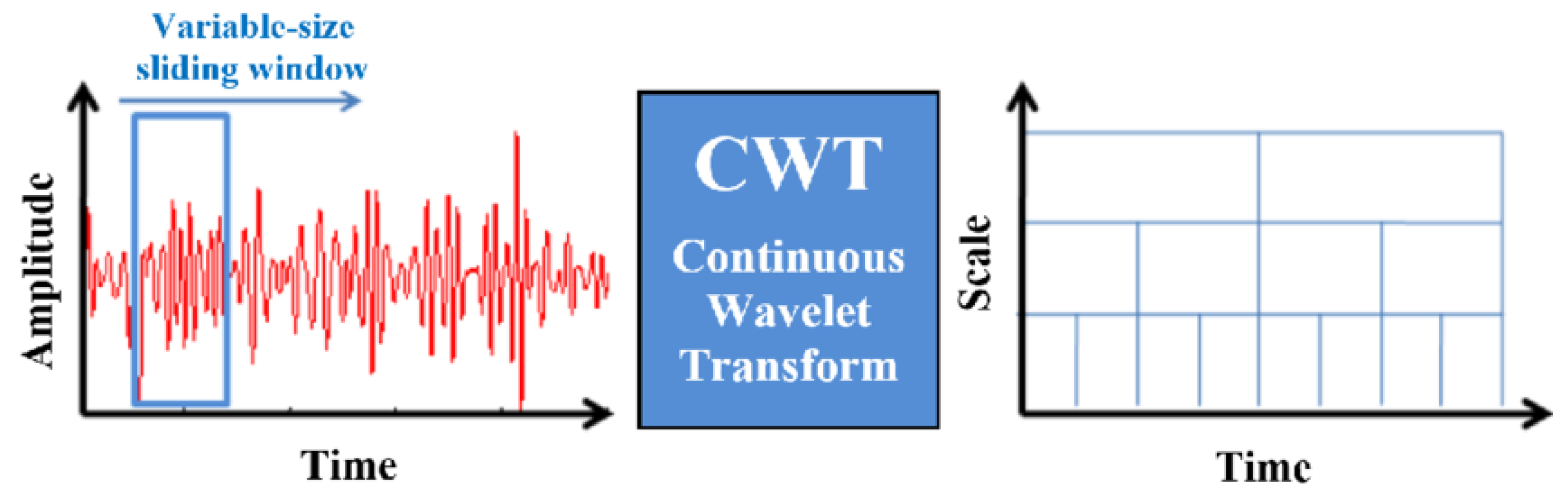
According to the aforementioned issues, in this article, a new method, called the entropy wavelet-based method (EWM), is presented, which eliminates the drawbacks of the WEAM via the implementation of an algorithm based on the Shannon entropy [
57]. This method avoids the need of obtaining three-dimensional colored CWT (continuous wavelet transform) diagrams with very good resolutions, a very wide initial scale range, and the appropriate choice of the color map to begin investigating whether there has been damage caused to the analyzed bridge via the use of monitoring data, as well as in which area of those diagrams the damage identification is easier, which again requires a significant computing time. With the entropy-based algorithm that is developed and implemented in this study, it is possible to know the most convenient specific scale value or scale range in a very timely manner, allowing for the identification of damage without a loss of precision in the damage location, thus saving a significant amount of computational time; this will be of great help for practical systematic applications on the bridges of the Federal Highway Network of a specific country.
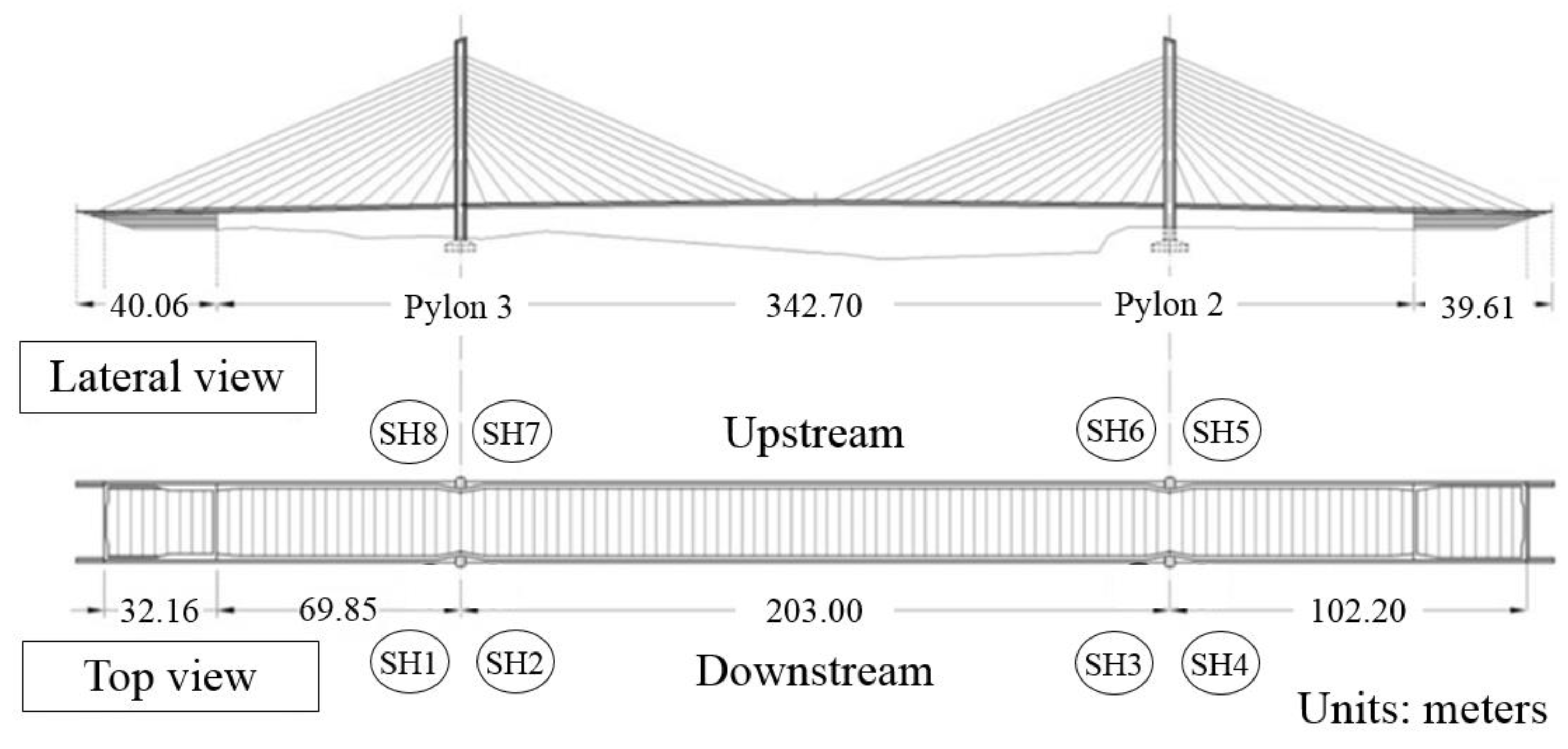
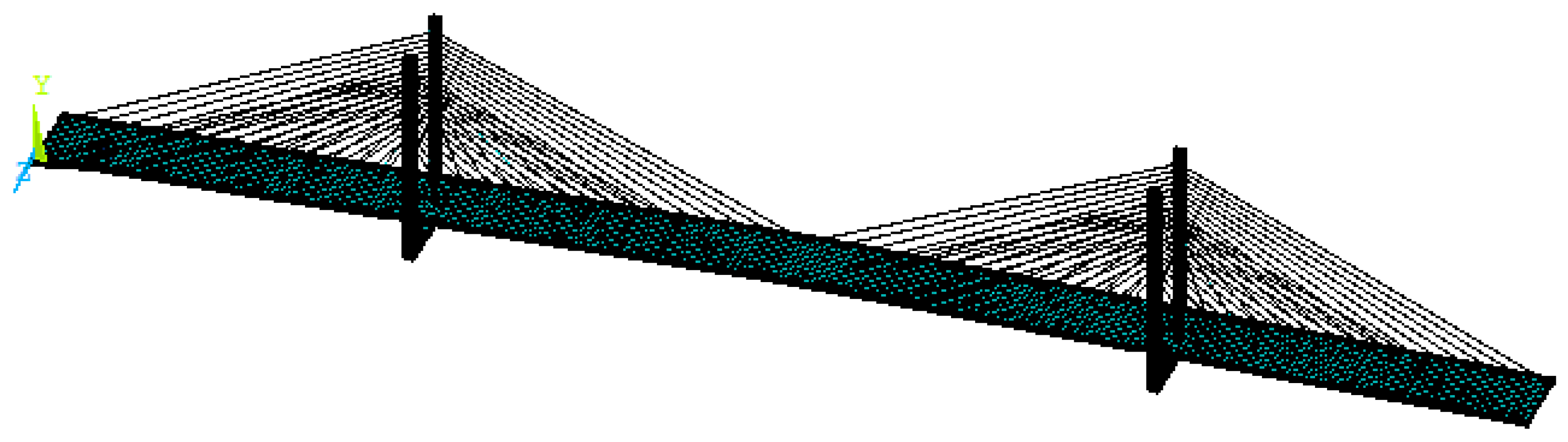
Thus, in this work, an entropy wavelet analysis is carried out, which gives rise to the new EWM, which improves the WEAM, making it more efficient for damage identification in highway bridges via the use of the vibration data obtained from numerical simulations, based on the finite element model of the Rio Papaloapan Bridge (RPB) in healthy conditions and with diverse damage scenarios (different locations and damage severities), which was calibrated by taking the vibration monitoring data of the real bridge in operation as reference. Moreover, the vibration data acquired from the real-life RPB in its healthy condition and with a removed cable are used to validate this new method in an experimental manner. Therefore, with the implementation of the algorithm based on the Shannon entropy, it is possible to optimize the WEAM in order to have a new, more efficient, and simple method (EWM) for the identification of damage in highway bridges, allowing us to obtain results for damage detection and localization with precision and with very low computing time. This has allowed us to simplify the original method, which involves more stages and analyses that require a high computational load and personnel with knowledge on the topic. It was demonstrated that the EWM is capable of eliminating 36% of the steps required to apply the WEAM, the damage location precision is increased 0.11%, and, above all, the computing time required to provide results is reduced by 5.67 times. For both methods, a Dell© Optiplex 980© computer with a 2.93 GHz Intel© Core© i7© processor, 1.81 TB of hard drive capacity, 8.00 GB of RAM, and Windows 10 Pro© operating system were used; whereas, the corresponding codes to post-process the signals were written in MATLAB© (R2017a). Thus, the results of the EWM application, both numerically and experimentally, were successful, and, therefore, this new method is presented as a promising alternative to be implemented permanently in the most critical bridges of a specific country in order to gain knowledge regarding their structural conditions, avoiding tragic collapses.
4. Numerical Results and Analysis
In this section, the EWM is numerically validated through simulations with the finite element model previously described. For this purpose, the EWM is applied in the FEM model of the RPB in its healthy condition, as well as with different damage scenarios. The results indicate that the detection and localization of all the damage cases is possible with the EWM in a quick, accurate, and efficient manner.
Since, in this article, the EWM is presented for the first time, in this section, several diagrams will be shown and analyzed in detail, which will allow for the sequential observations of how the idea of making the WEAM more efficient arose, by implementing an algorithm based on the Shannon entropy in order to give way to the EWM. Moreover, the EWM was applied to identify diverse damage conditions, and the corresponding results/diagrams will be also presented.
The most important challenges that led to the development of the EWM were the reduction of the steps required to apply the WEAM and the reduction of the computing time necessary to obtain the results, which allow for the detection and localization of damage without losing any precision. Therefore, since these are processes that involve a significant computational burden which are related to other stages, it was identified that the definition of the CWT scale range, useful for identifying damage with the WEAM via the use of colored 3D CWT diagrams, is the most critical stage of that method (stage 5 in [
1]), along with the generation of new colored 3D CWT diagrams to identify damage in the area of interest (stage 8 in [
1]).
Thus, considering the stages of the WEAM, which were described in detail in [
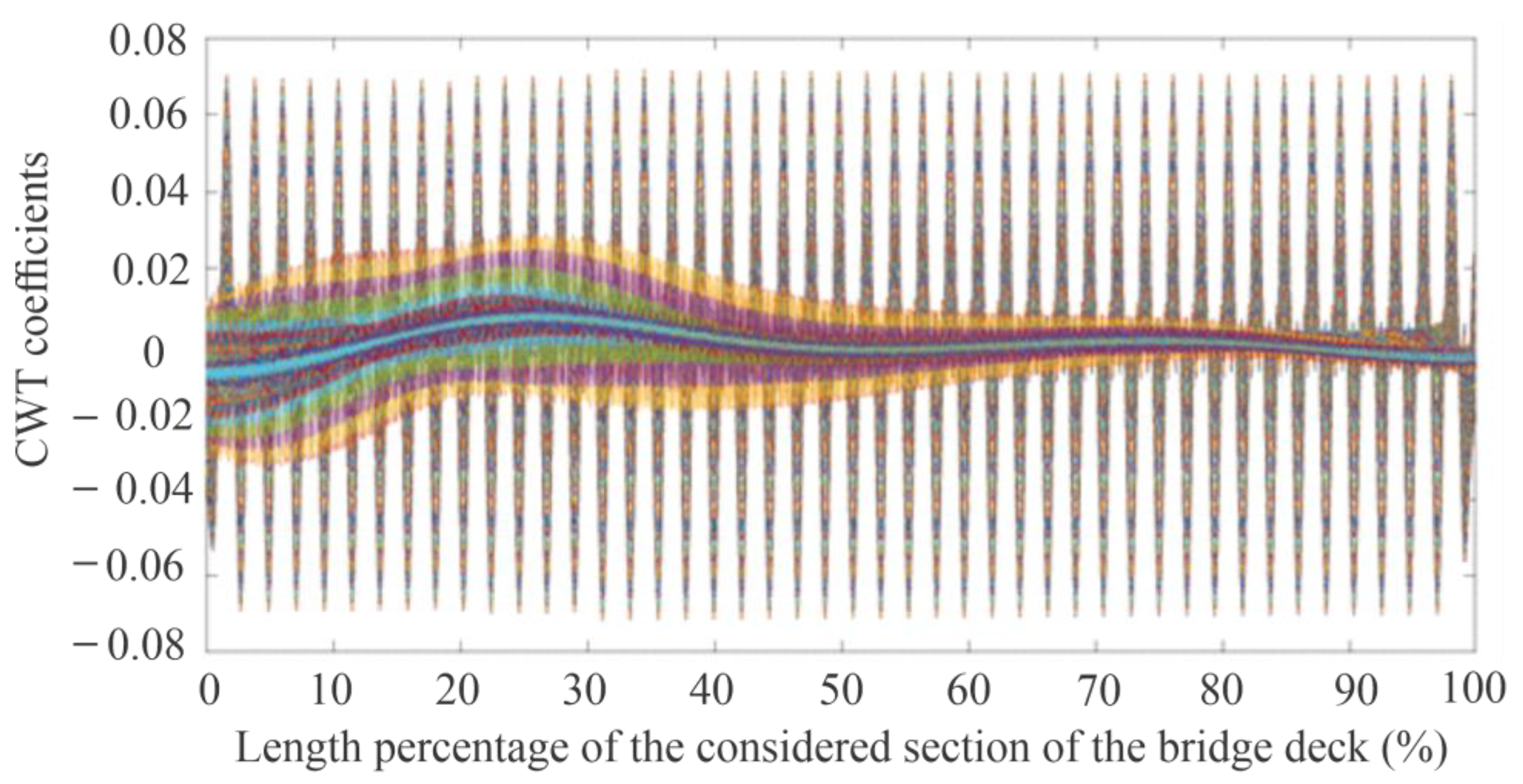
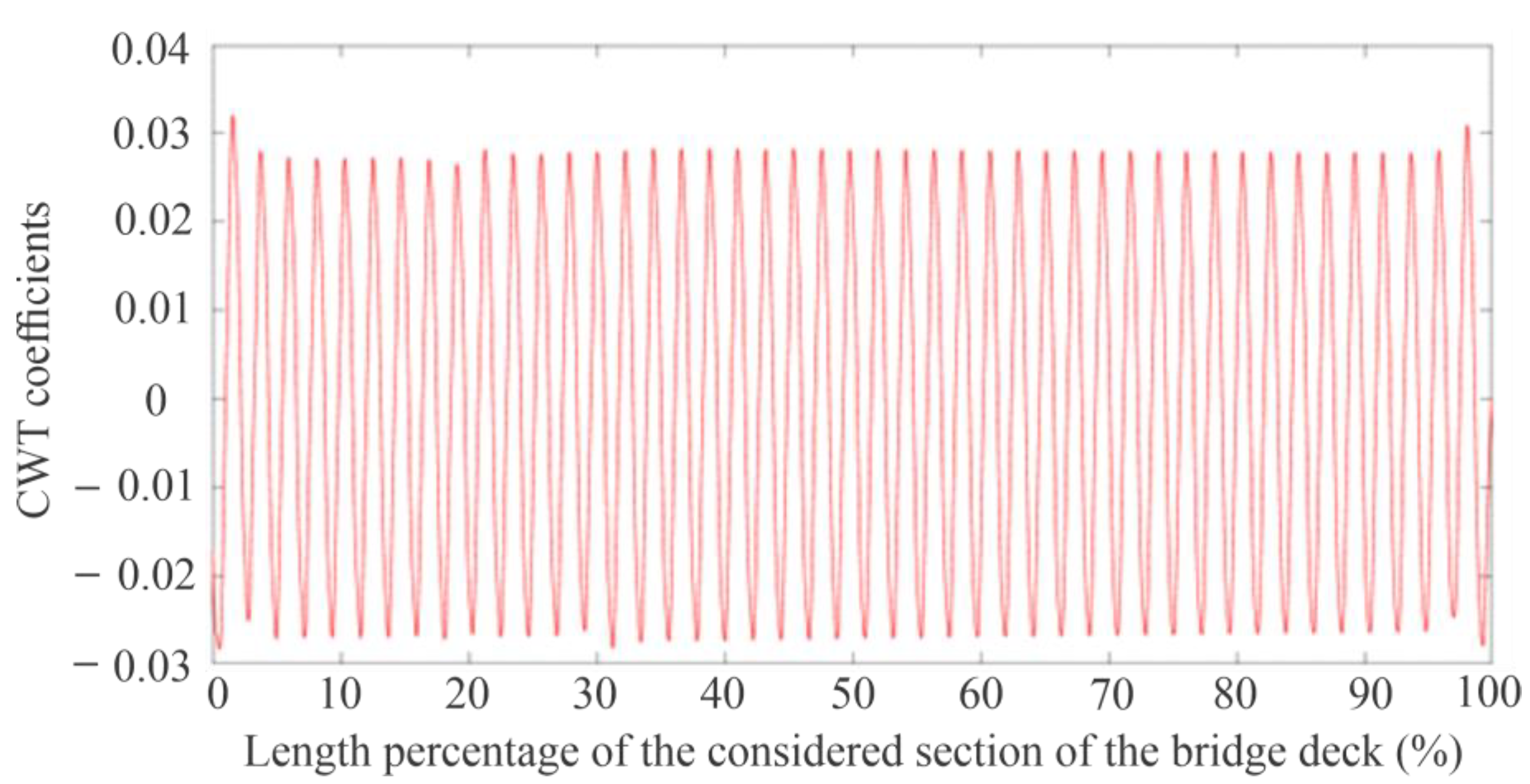
1], seven of those steps were eliminated via the EWM (steps 4, 5, 7, 8, 9, 10, and 11); that is, 64% of the WEAM stages were eliminated and replaced with a few steps requiring low computing time consumption. It should be noted that around 95% of the computing time needed to obtain the results via the application of the WEAM and determine the health condition of the analyzed structure relates to the stages 5, 7, 8, 9, and 10, and all of them were eliminated with the EWM. Consequently, the EWM began to be designed, processing the corresponding data from the numerical simulations with the scenario of the damaged bridge, with an intermediate severity damage on the deck at 25% of the length (simulated by reducing 30% the area of the cross-section at 25% of the 203 m length of the bridge deck between towers), and the CWT coefficients were obtained for each scale value, from 1 to 1000, measuring at 25% of L. In the corresponding diagram that was obtained (see
Figure 9), it can be observed that it is difficult to detect damage due to the large number of curves. However, it can be noted that there are certain curves with magnitude increments of CTW coefficients around 25% of L. Therefore, it is necessary to define what scales these curves correspond to, discarding those that are not useful.
To clarify the diagram shown in
Figure 9, the CWT coefficients were obtained again for the scale range from 1 to 1000, but now with increments of 50, and the corresponding results are presented in
Figure 10. Thus, in
Figure 10, it is possible to observe that most of the curves that are not useful for detecting damage no longer appear, while a significant number of the useful curves that suggest the existence of damage at 25% of L are preserved. Therefore, for this analyzed scenario, there are more useful curves than there are curves that do not reveal the presence of damage.
Therefore, in order to have a reliable parameter that allows for the systematic defining of the useful scale range to identify damage without the need of obtaining CTW coefficient curves for different ranges and increments of scale, an algorithm based on the Shannon entropy was implemented (see
Section 3.1, Equation (1)). In this way, the average SEI for the CWT coefficients (entropy–CWT diagram) considering all of the measurement points (25%, 50%, and 75% of L) of the current scenario and the same wide scale range (1 to 1000) and scale increment used for the diagram in
Figure 9 is obtained. Thus, in
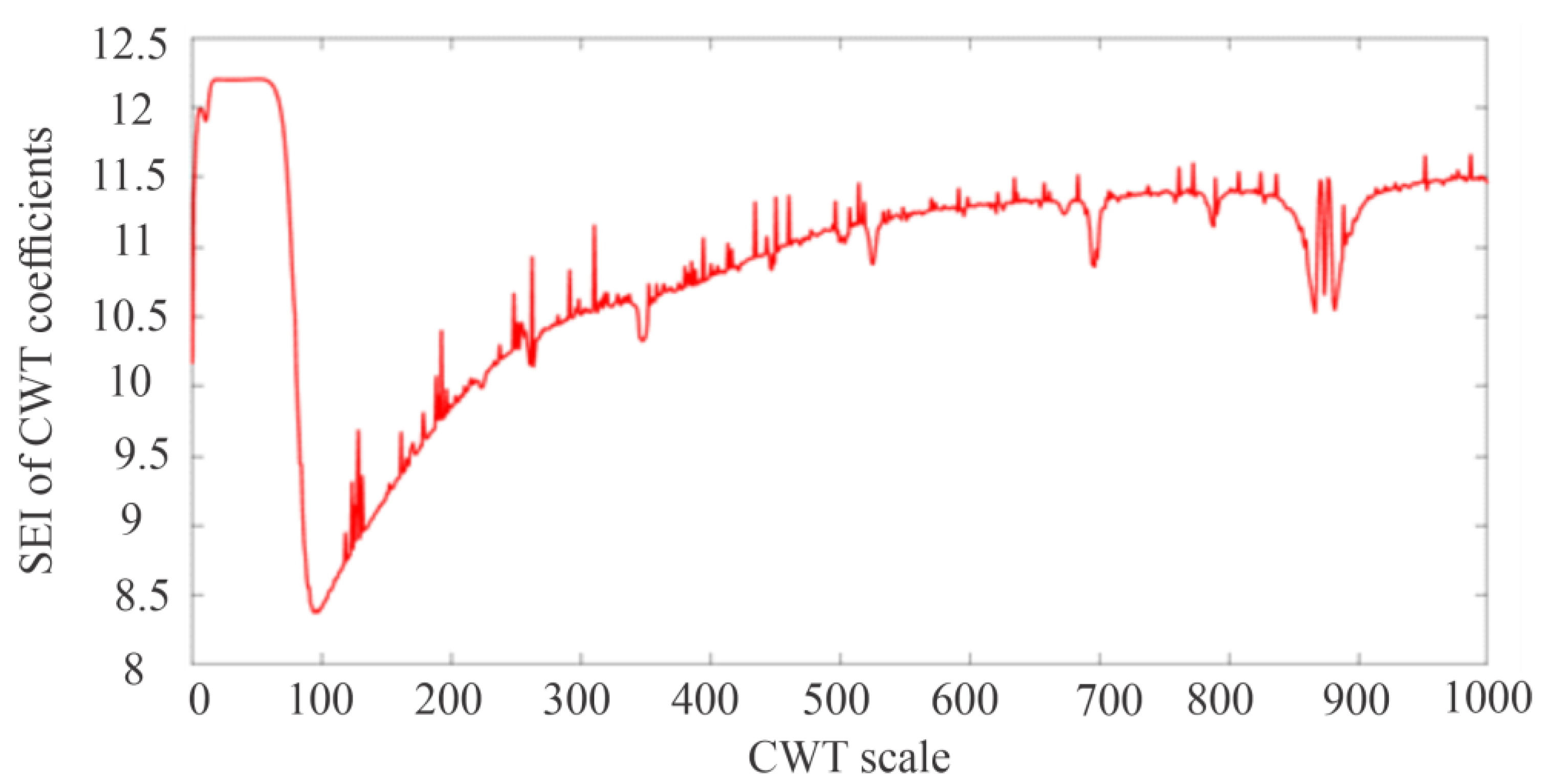
Figure 11, the respective results of the average SEI can be observed, where three zones are clearly noticed.
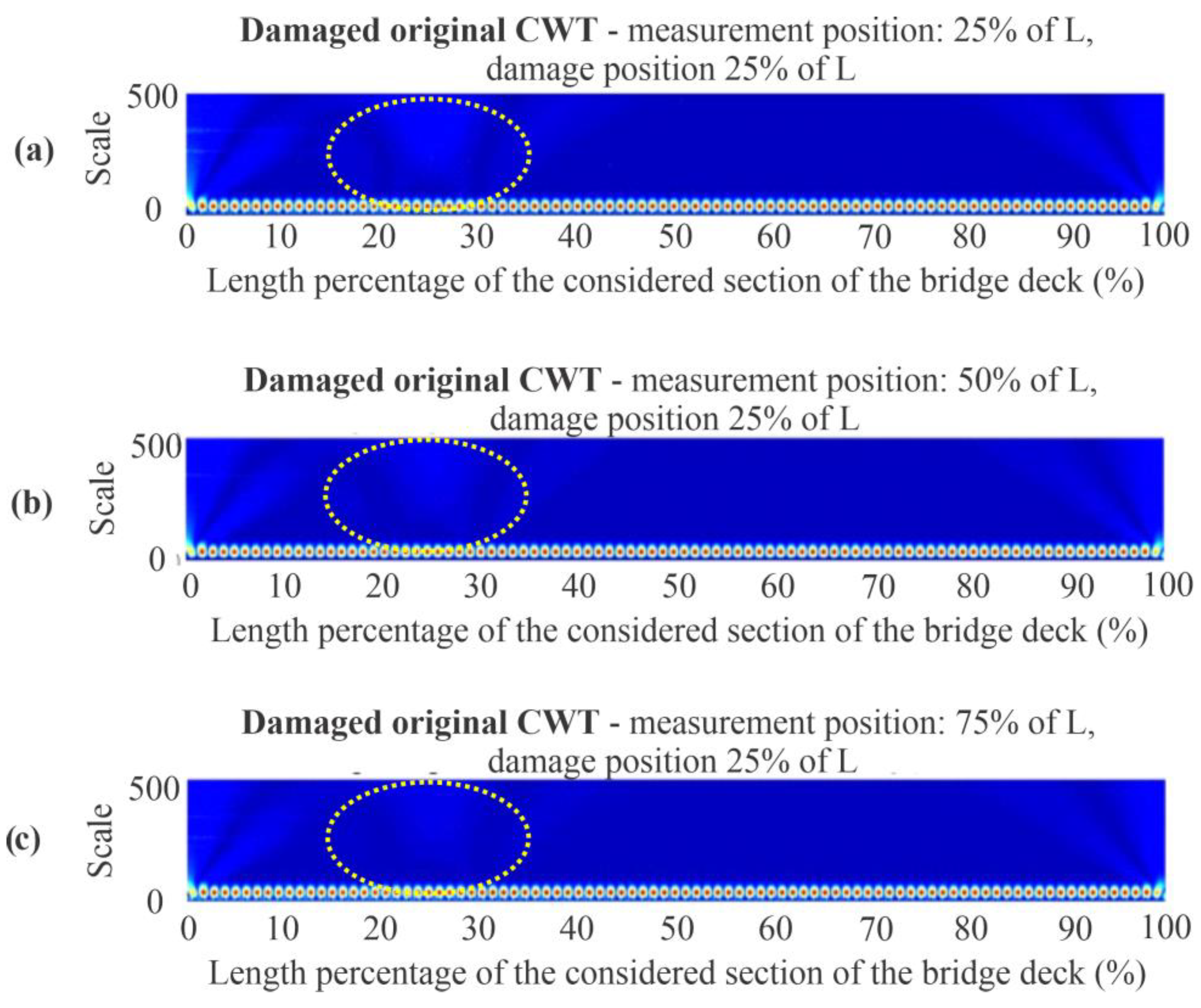
SEI zone 1: This has a scale range from 1 to 52, and the maximum SEI value can be located. In this zone, the effects of the natural frequencies of the system are present (if the WEAM were used, they would correspond to the reddish spots, indicating high CWT coefficients, as presented in the lower part of the colored 3D CWT diagrams, see
Figure 12). Therefore, the high levels of chaos or entropy in this zone are due to the effect of natural frequencies, and not the effects of damage. Therefore, this zone is not useful and should not be considered to define the scale range in the EWM.
SEI zone 2: This has a scale range from 53 to 98, where the average SEI value falls from its maximum value to its minimum value. This zone indicates that the effects of natural frequencies begin to decrease until they are completely eliminated, and, on the other hand, the effects of damage have not yet appeared yet. Consequently, the chaos decreases sharply, and the minimum entropy value is due to the edge effects of the signals. This area should also not be considered to establish the scale range to detect damage.
SEI zone 3: This has a scale range from 99 to 1000, where the average SEI value gradually increases from its minimum value to a very high value close to its maximum. This zone indicates that the effect of the natural frequencies no longer exists, and the entropy increment is mainly due to the manifestation of the effects of the damage presence. Therefore, the chaos generated in this area is useful to define the scale range to identify damage.
It is important to mention that the presence of any kind of defect in any type of bridge will be clearly detectable just via the use of the SEI zone 3, since it is only in this zone that the effect of the natural frequencies, which is the most hostile and makes damage detection impossible, does not exist anymore, and the damage manifestation will be clearer. However, the CWT scale values of this zone, as well as the other two zones, will change according to the analyzed structure, and must then be determined, since the natural frequencies are an intrinsic parameter of any structure, with specific values according to its properties/geometry.
Thus, the entropy–CWT diagram presented in
Figure 11 was obtained in less than 21 s (less than 7 s for each measurement point), and this is the diagram that allows for the elimination of the most critical stage of the WEAM (stage 5: generation colored 3D CWT diagrams to establish the useful scale range, which implies about 3 min and 8 s of computing time, as in
Figure 12 [
1], but with a scale range from 1 to 1000) and the subsequent stages that are related to this critical stage, and which consume around 95% of the WEAM post-processing time, as mentioned above. In
Figure 12, the yellow dotted ellipses indicate where energy differences can be observed according to the measurement point and the damage point.
Continuing with the development of the bases that gave rise to the EWM, and taking into account the entropy–CWT diagram presented in
Figure 11, the usefulness of the SEI zone 3 to detect damage is verified. To do this, the average of the CWT coefficients is obtained considering the measurement position of 25% of L and the scale range from 1 to 100 (
Figure 13). This scale range includes the complete SEI zone 1 and SEI zone 2, as well as the beginning of the SEI zone 3, where the SEI is just beginning to increase due to the damage. In this way, looking at
Figure 13, as expected, there is no indication of damage.
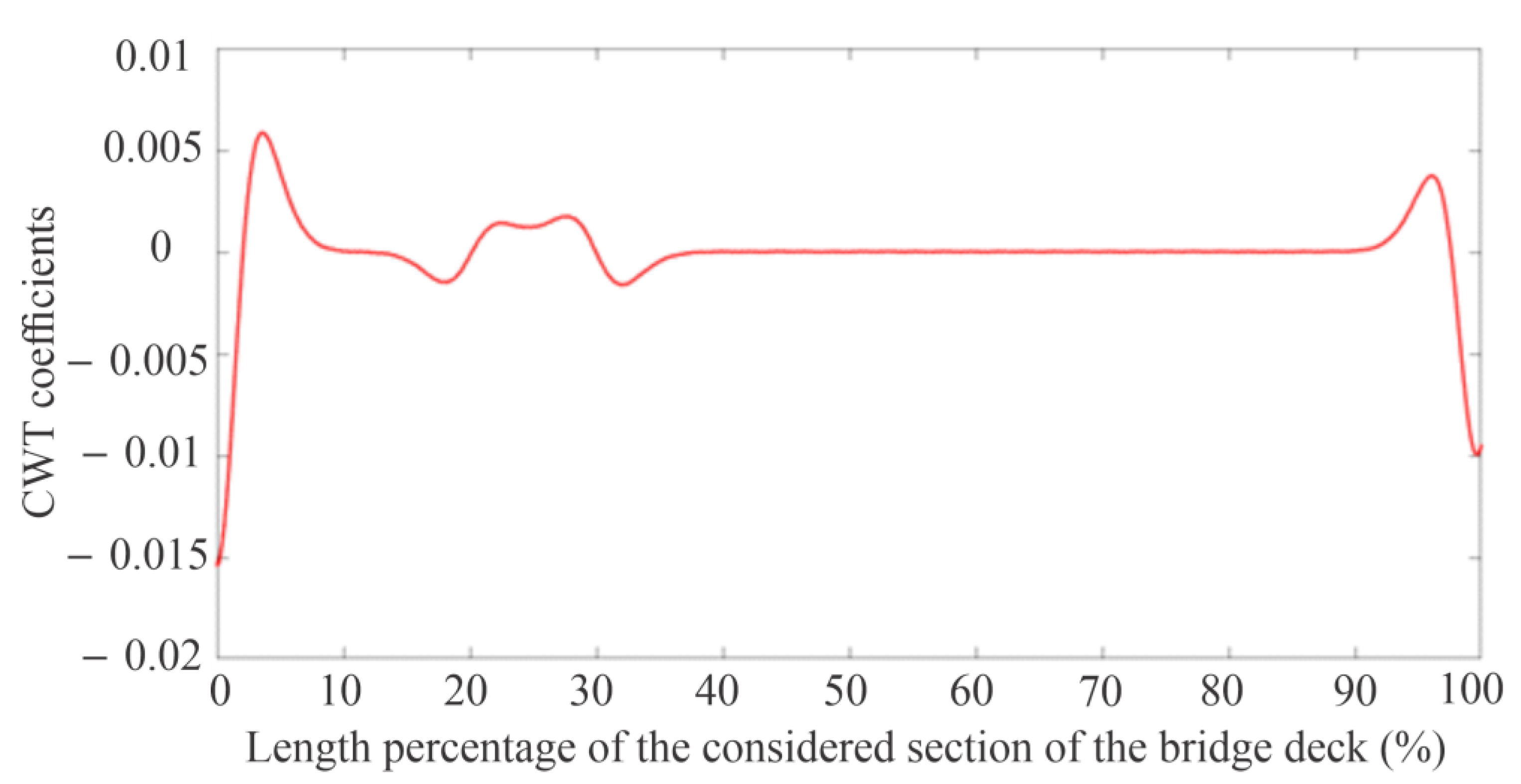
On the other hand, if the scale ranges from 101 to 181 is considered, that is, a scale range that is already completely in SEI zone 3 but still at the beginning of this zone, and the average of the CWT coefficients is obtained considering the measurement position of 25% of L, then, in
Figure 14, it can be seen that the identification of the damage is already possible due to the magnitude increment of CWT coefficients around 25% of L. However, since the damage manifestation is just beginning in this zone, the edge effects of the signals still predominate, which is why the largest magnitude CWT coefficients are found at the extremes of the diagram.
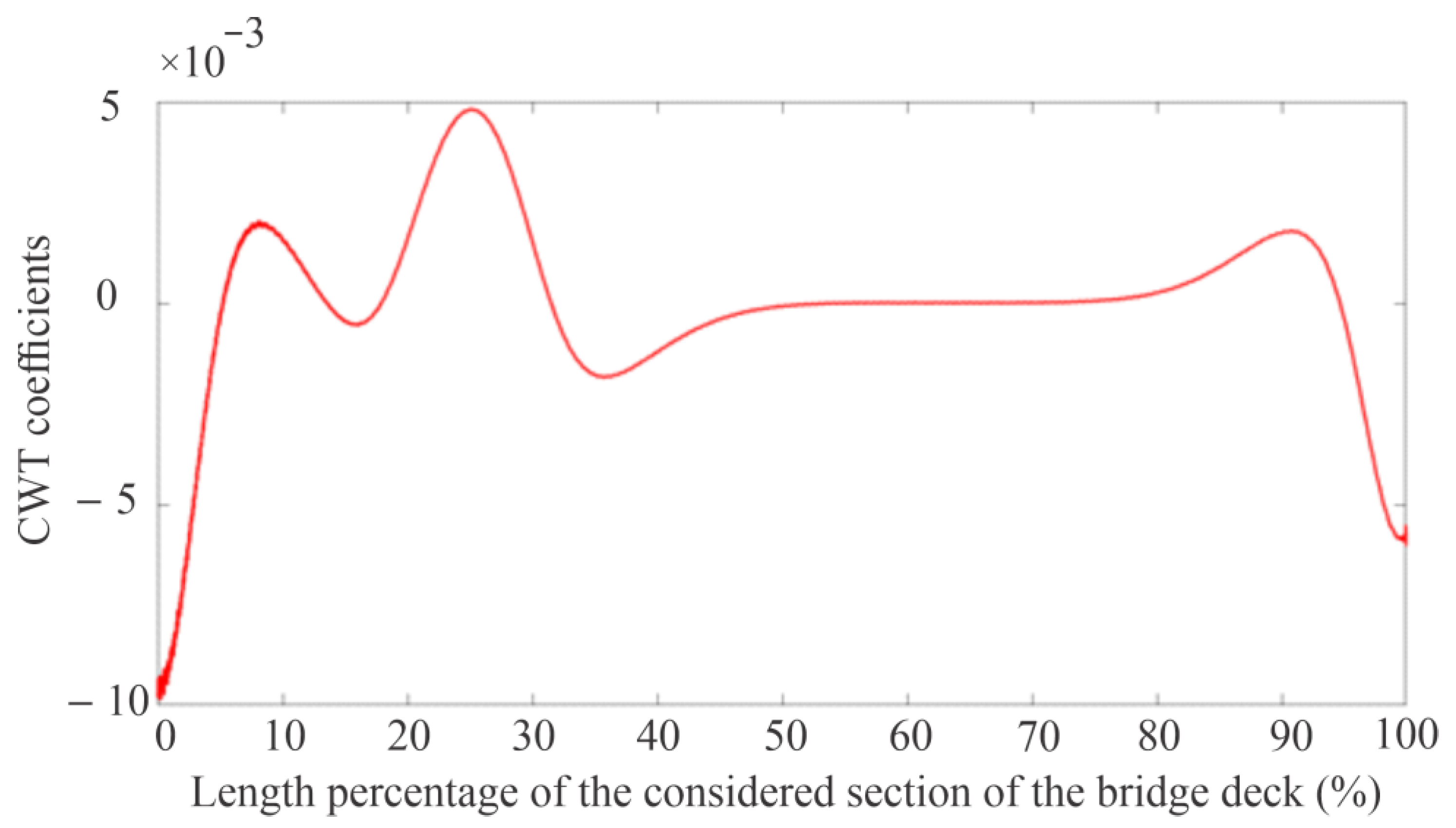
Now, if the scale ranges from 181 to 500 is considered, that is, from the last scale value of the previous figure (
Figure 14) and up to half of the maximum scale value considered, then the entropy increment in this range is already very significant (see
Figure 11), and, therefore, the effects of the damage presence are of great significance, which can be verified by generating the corresponding diagram of the average CWT coefficients (see
Figure 15).
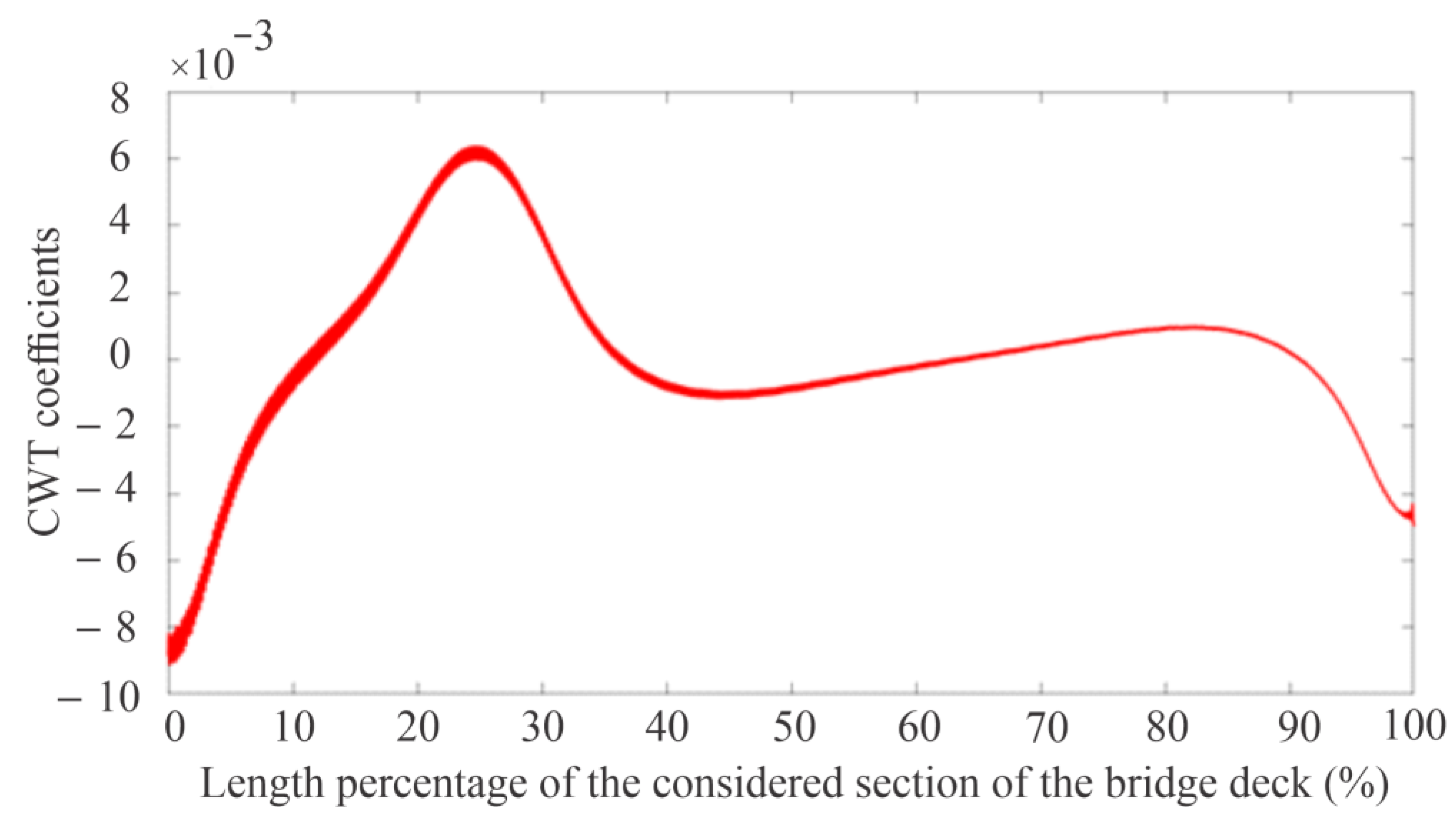
In
Figure 15, it can be noted that, for this scale range of 181 to 500, the sudden increase in the magnitude of the average CWT coefficients around the damage zone is very evident, reaching its maximum value practically at the exact damage position (at 25.13% of L). Additionally, it is important to highlight that the damage effect in this region of SEI zone 3 is already very important, meaning that even the maximum value of the average CWT coefficients at the damage zone exceeds the maximum values of the CWT coefficients generated at the ends of the diagram due to the signal edge effects.
On the other hand, since it was found that the scale range, from 181 to 500, which is located in SEI zone 3, is very useful for identifying damage, this scale range is extended up to the maximum value considered in
Figure 11, taking advantage of the influence of more damage effects. Then, the scale range, from 181 to 1000, is now considered, and the respective average CWT coefficients are obtained (see
Figure 16). In
Figure 16, it can be observed that the curve of the average CWT coefficients increased its magnitude even more in the damage region because a larger damage influence zone is considered and, therefore, the chaos or entropy of the CWT coefficients is also higher. Likewise, the precision in locating the damage is the same as in
Figure 15 (99.48% precision).
The other situation that must be highlighted in
Figure 16 is the reduction of edge effects, even though the signal has not yet been treated/conditioned for this purpose. This is because, by expanding the scale range, the damage effect is “strengthened”, and the edge effects of the signal are “dimmed”, so, as expected, the edge effect that is most inhibited is the closest one to the damage position; that is, the one on the left side of the diagram.
Both the diagrams in
Figure 15 and
Figure 16 are generated very quickly (4 s required for the one in
Figure 15 and 10 s for the one in
Figure 16). Therefore, the time difference between them is very small, but, with the diagram presented in
Figure 16 with a wider scale range, more noticeable evidence of damage and the inhibition of signal edge effects is gained without the need of conditioning the signal (signal extension at both ends). Nevertheless, the diagram shown in
Figure 15 is also very useful for identifying damage.
Thus, it is recommended to define the scale range using SEI zone 3 of the entropy-CWT diagram, locating the lowest entropy value first, and then establishing the minimum value of the scale range after the lowest entropy value in order to allow the damage to begin to manifest. The maximum value of the scale range should be defined when the SEI value of the entropy–CWT diagram practically no longer increases and remains constant. For the case currently analyzed, the scale range, from 181 to 1000, is excellent, as demonstrated in
Figure 11,
Figure 15 and
Figure 16.
On the other hand, in order to demonstrate the reliability, efficiency, quickness, and precision of the EWM, the average CWT coefficients for the current case of damage at 25% of L is obtained for the scale range from 181 to 1000, but now considering the corresponding average of the CWT coefficients for the three measurement points (25%, 50%, and 75% of L) instead of just one measurement point at 25% of L. In this way, it is possible to verify that the EWM, like the WEAM, does not require a measurement point at the damage position, and the average of a few measurement points proportionally distributed is sufficient to identify damage.
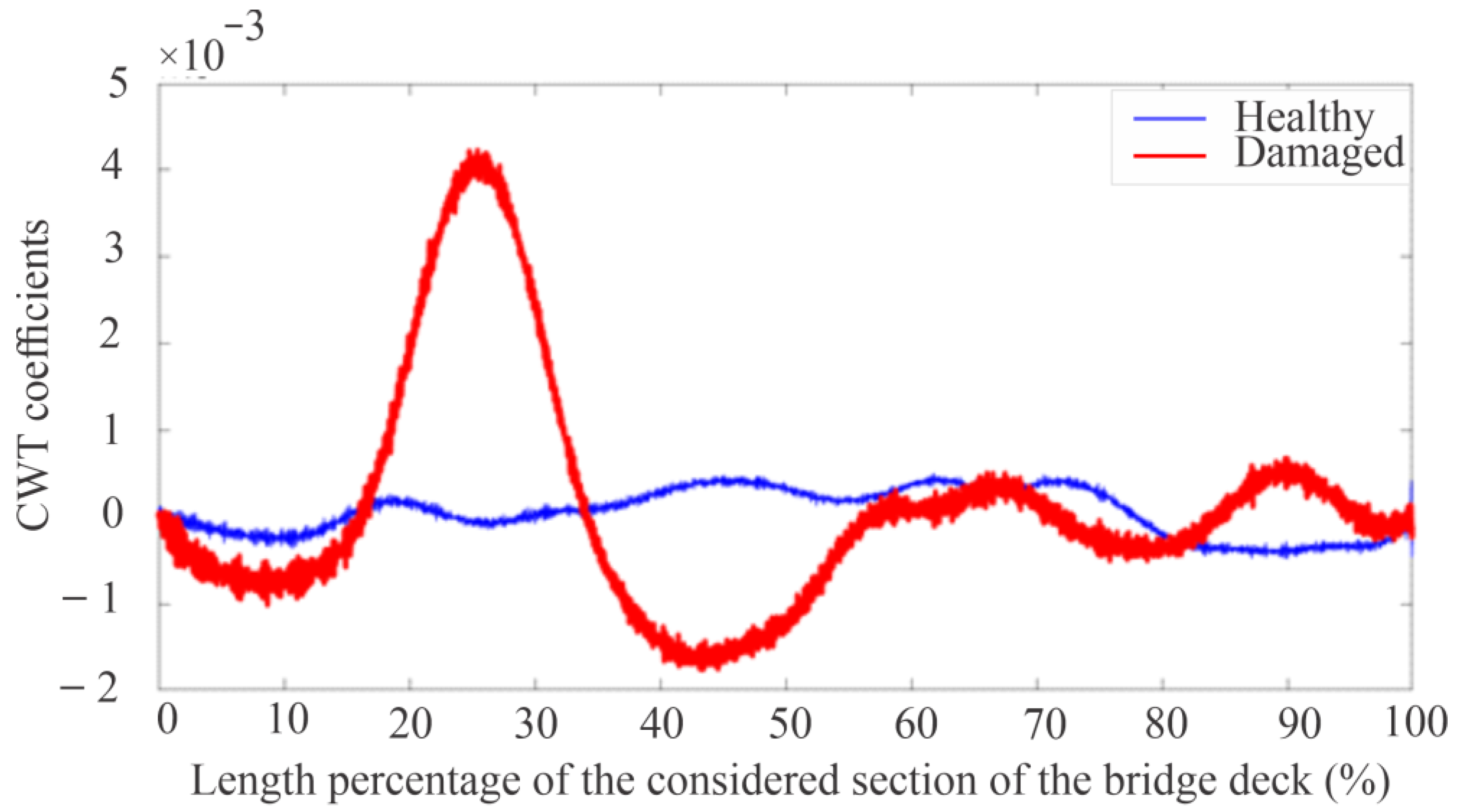
Figure 17 shows the diagram with the corresponding curve to the case mentioned in the previous paragraph, and, additionally, the respective curve of the healthy case considering the three measurement points is also included. In this figure, it can be clearly observed that the curve of the healthy case looks very flat, without any magnitude increments of CWT coefficients in specific positions; however, the curve of the damaged case, similar to the one presented in
Figure 16, exhibits an evident sudden increase in the damage area, locating this defect with 99.44% precision.
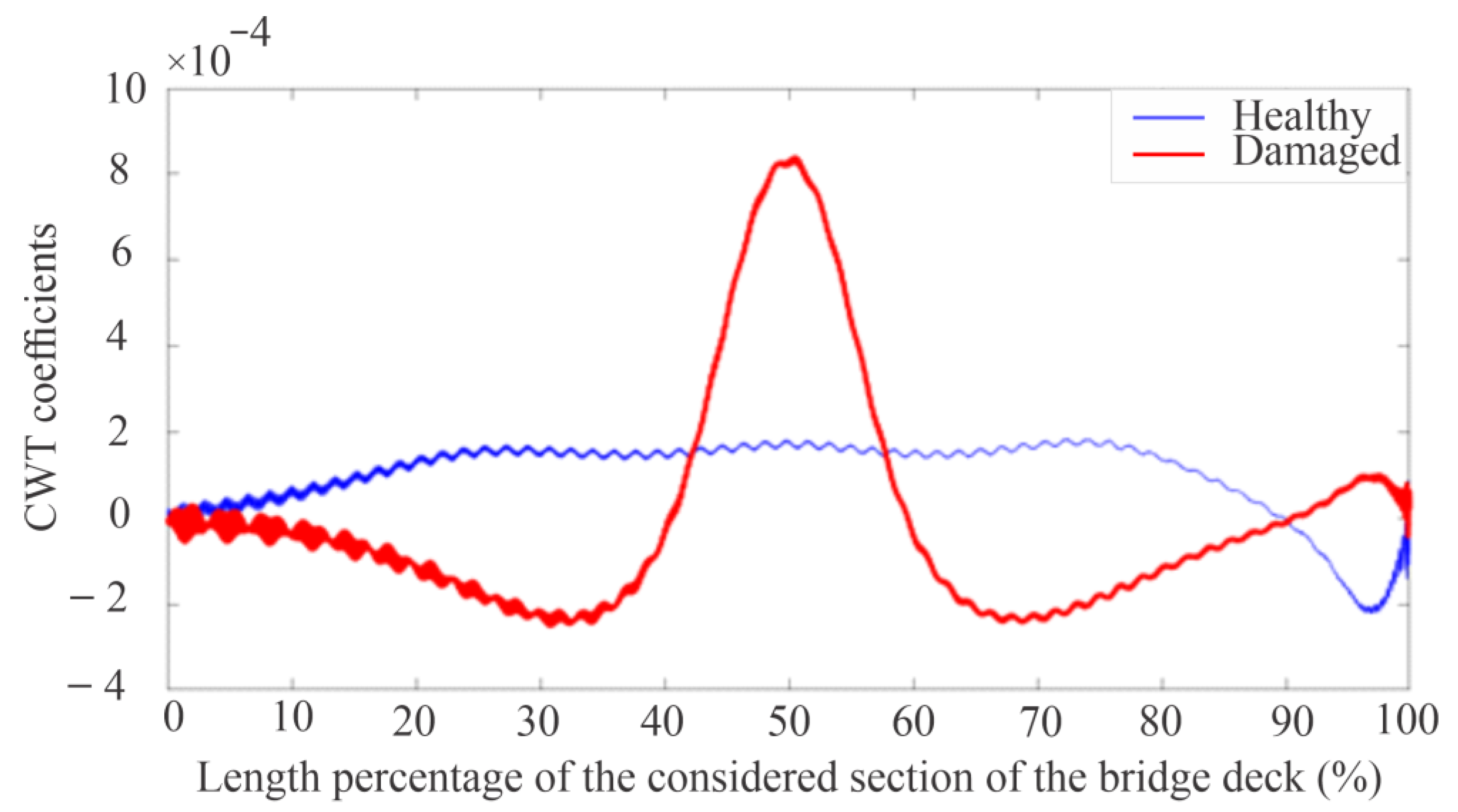
Finally, in order to have a diagram that makes the presence of the damage even more noticeable, the same diagram presented in the previous figure (
Figure 17) is obtained, now eliminating the edge effects, for which, before obtaining the average CWT coefficients for the chosen scale range and considering the three measurement points, the original signals (time vs. acceleration) provided by the numerical simulations with the FEM model are extended at both ends. That is, the first and last cycles of the signals are repeated on the left and on the right sides, respectively; smoothing, in this way, the beginnings and ends of the signals in order to avoid the generation of discontinuities, which produce high CWT coefficients. The process of eliminating edge effects via signal extensions is the same as the one used for the WEAM, which is very simple, quick, and can be consulted in [
1].
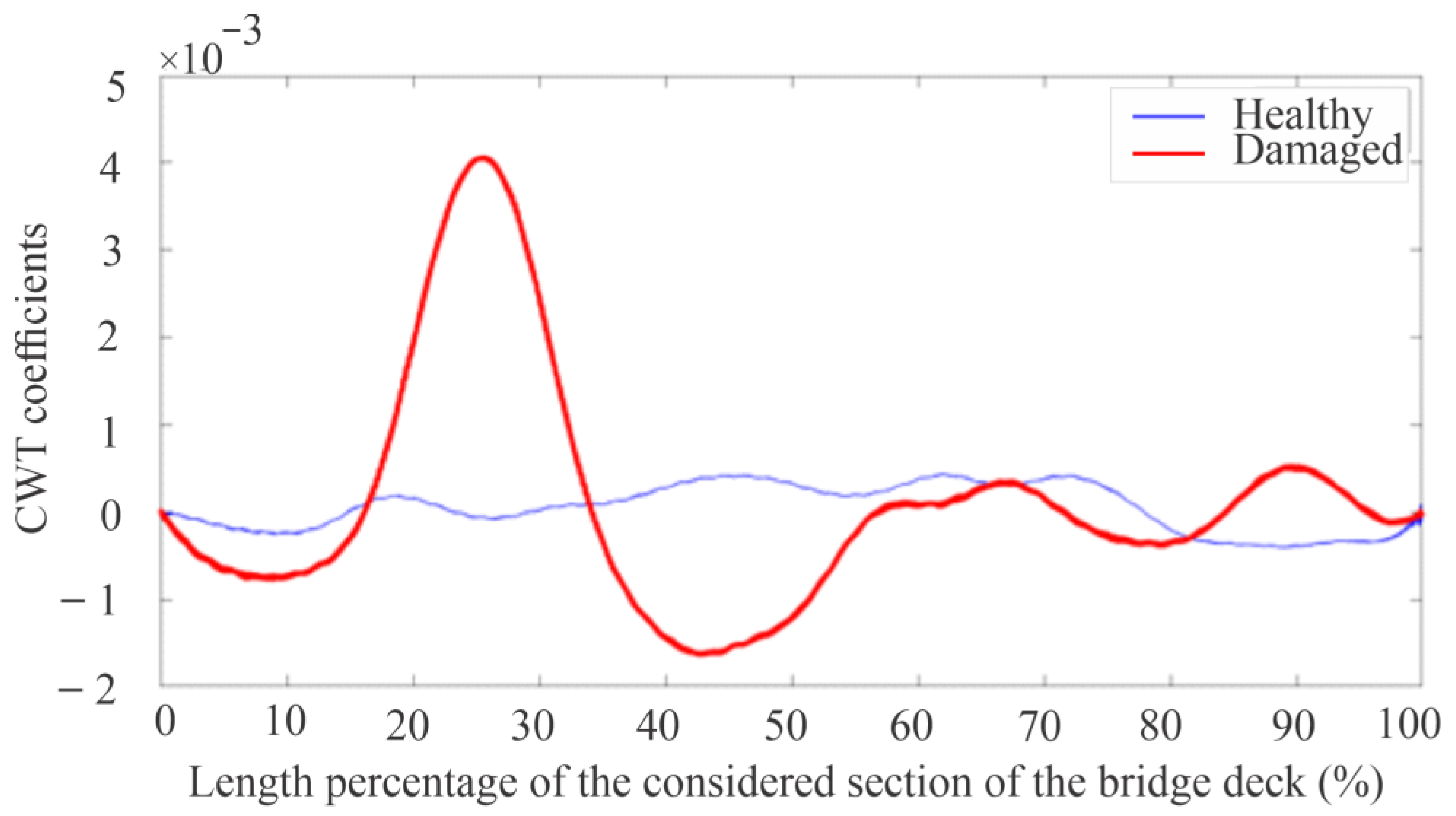
Therefore, the corresponding diagram without edge effects is shown in
Figure 18. Comparing this latest diagram without edge effects with the corresponding diagram with edge effects (
Figure 17), the benefit of eliminating edge effects is very evident, since the curve of the healthy case becomes even flatter because it does not contain effects that increase the CWT coefficients; there are only residual edge effects, which are almost negligible. On the other hand, for the damaged case curve, the high values of CWT coefficients in the regions where there is no damage are eliminated, and the sudden increase in the CWT coefficients is further concentrated in the damage area. In fact, the maximum value of CWT coefficients is further adjusted with the exact damage position, since the damage was located with 99.44% accuracy with edge effects, while, without edge effects, the localization precision was 99.68%.
Taking into account that these results are obtained numerically, in order to apply the EWM using signals more similar to those acquired from real-life bridges, 15% of Gaussian noise was added to the numerical signals obtained from the FEM simulations. In order to closely simulate reality, the percentage of added noise is a very high value according to what is usually considered in the literature [
64].
Figure 19 shows the equivalent diagram to the one presented in
Figure 18, now adding Gaussian noise to the signals before being processed. As it can be observed, despite the noise effect, damage detection is still clearly possible, and is located with 98.12% accuracy, which is an excellent percentage, especially considering the large amount of noise that was added to the signals and the extensive length of the bridge considered.
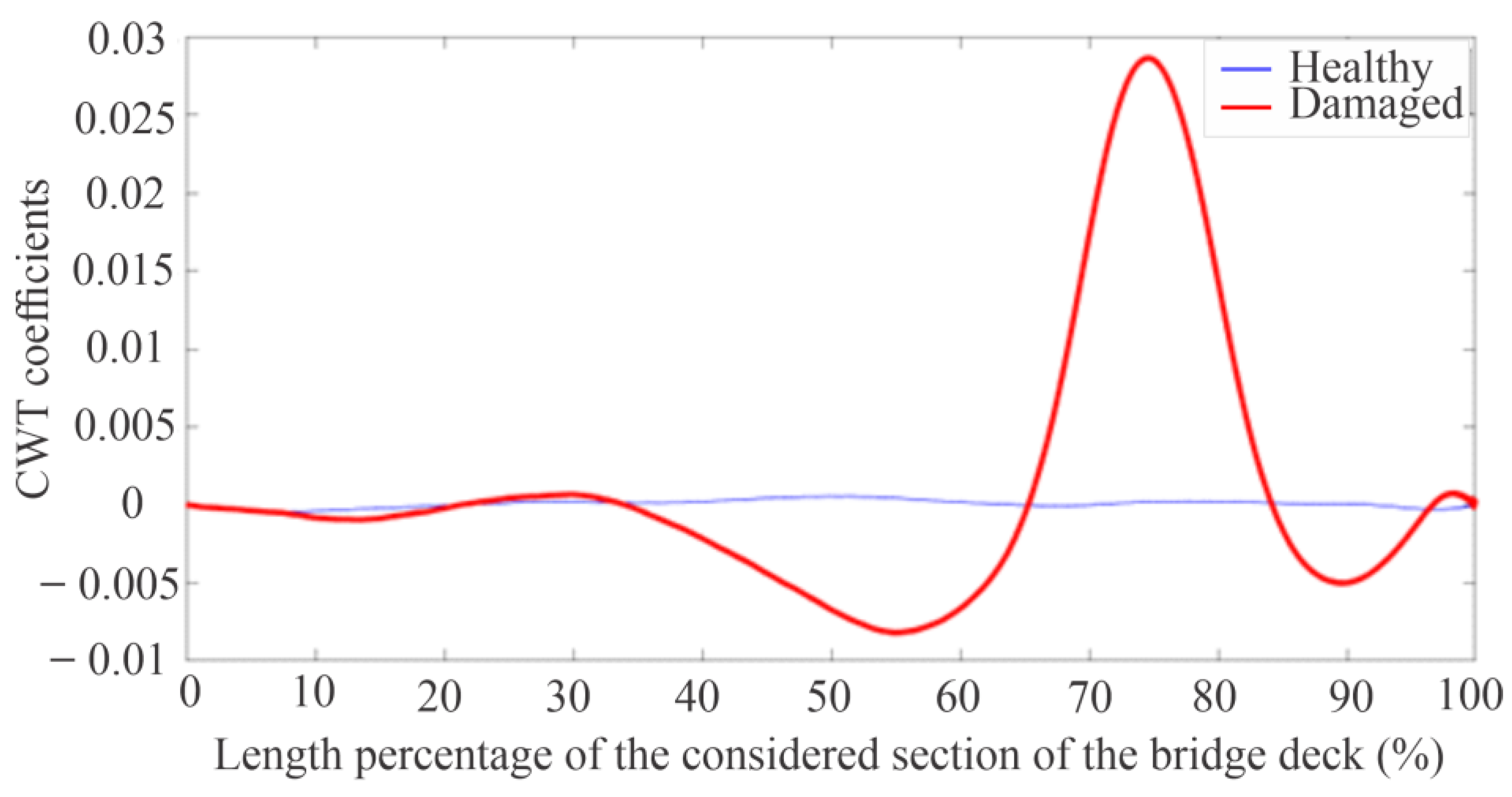
Finally, as it would occur in the practice of signal processing acquired in real-life bridges, the noisy signals are filtered to try to eliminate as much noise as possible and ensure that they are as similar as possible to the signals obtained directly from the FEM simulations before adding noise. To do this, a Savitzky–Golay filter of order 2 and window length 19 is used, in the same way that it was used for the case presented in [
1] when applying the WEAM. The corresponding CWT coefficients diagram from filtered signals is shown in
Figure 20, and it is possible to see that the curves are smoothed and the damage identification becomes clearer and more precise with respect to the noisy case, locating the damage with an accuracy of 98.76%, thus improving the accuracy in damage identification with signal filtering, and maintaining similarity to the original case before adding Gaussian noise (
Figure 18 localizing the damage with 99.68% accuracy).
Additionally, to demonstrate the usefulness of the entropy–CWT diagram, particularly in SEI zone 3, instead of graphing the average of the CWT coefficients for the selected useful scale range (181 to 1000), the CWT coefficients for the damaged case analyzed are obtained for a single scale value that is within SEI zone 3, where the chaos increment caused by the damage is already evident. Thus, the scale value of 300 is chosen, and the CWT coefficients are plotted for this damaged case (measuring only at 25% of L) both with and without edge effects; see
Figure 21 and
Figure 22, respectively.
As it can be seen in both diagrams, the increase in the CWT coefficients in the damage zone is noticeable, even more so for the case without edge effects. Therefore,
Figure 22 shows that the damage can be identified clearly and very accurately (99.92% accuracy in locating the damage), even with the CWT coefficients corresponding to a single scale value; however, this scale must be very well chosen based on the entropy–CWT diagram.
On the other hand, the EWM is applied again, as shown in
Section 3.3 of this article, to demonstrate the capacity of the EWM in order to identify damage of different severities and in different positions, taking as reference the diagram shown in
Figure 20, which is the final diagram obtained by applying the EWM to identify damage for the case of a bridge with intermediate level damage (30% reduction in cross-sectional area) at 25% of L. This was completed to obtain the two corresponding diagrams for the case of low severity damage (10% reduction in cross-sectional area) at 50% of L (
Figure 23) and high severity damage (50% reduction in cross-sectional area) at 75% of L (
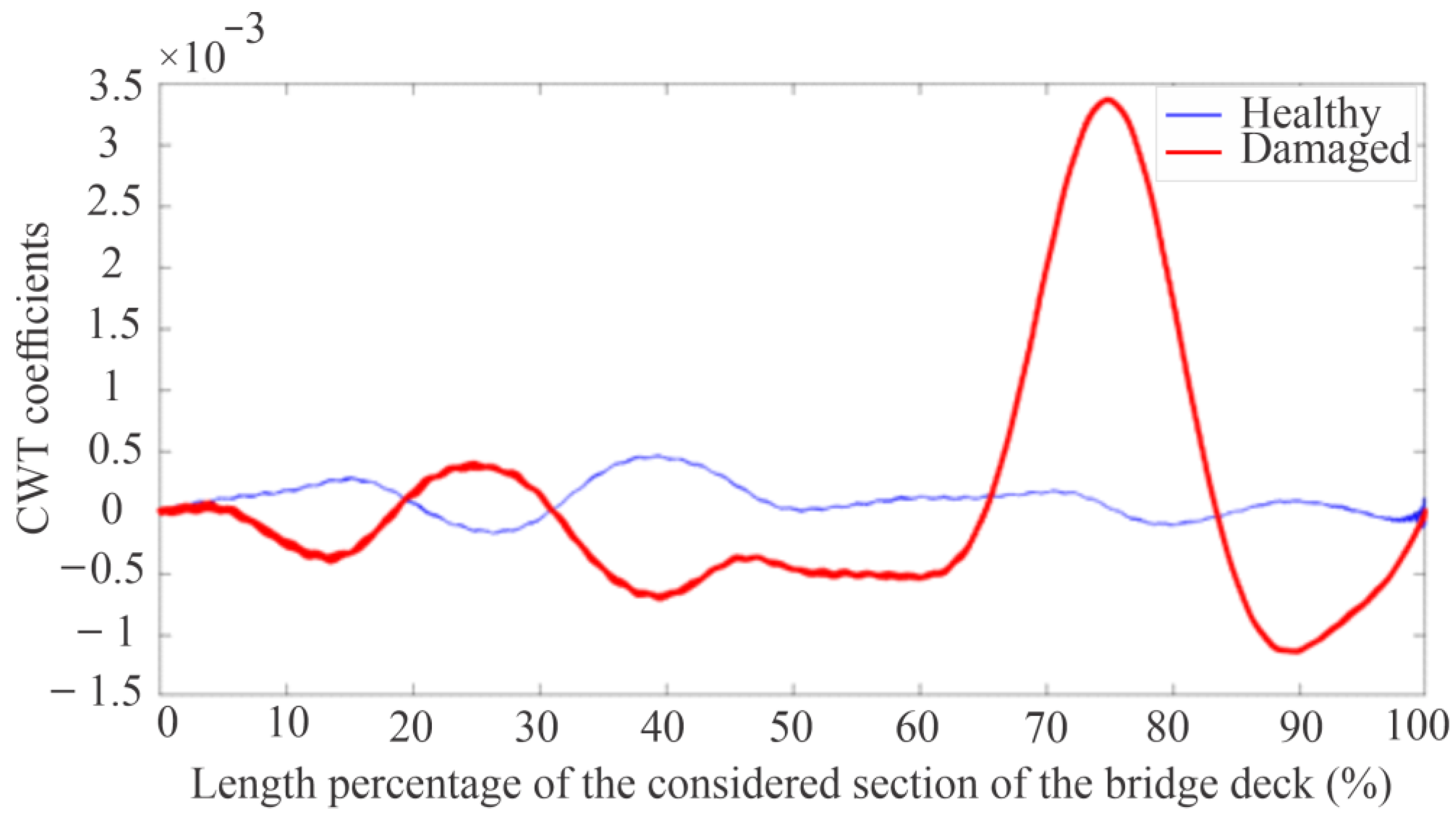
Figure 24).
As it can be seen in both
Figure 23 and
Figure 24, the EWM is capable of clearly identifying damage of different severities in different positions with efficiency, low computing time consumption, and high precision. To obtain each of those diagrams, as well as the diagram in
Figure 20, about 51 s were required, while, in terms of the precision of damage location, the damage established at 50% of L was located with 99.04% accuracy (
Figure 23), the damage established at 75% of L was identified with 99.97% accuracy (
Figure 24), and, previously, the damage defined at 25% of L was located with 98.76% precision (
Figure 20).
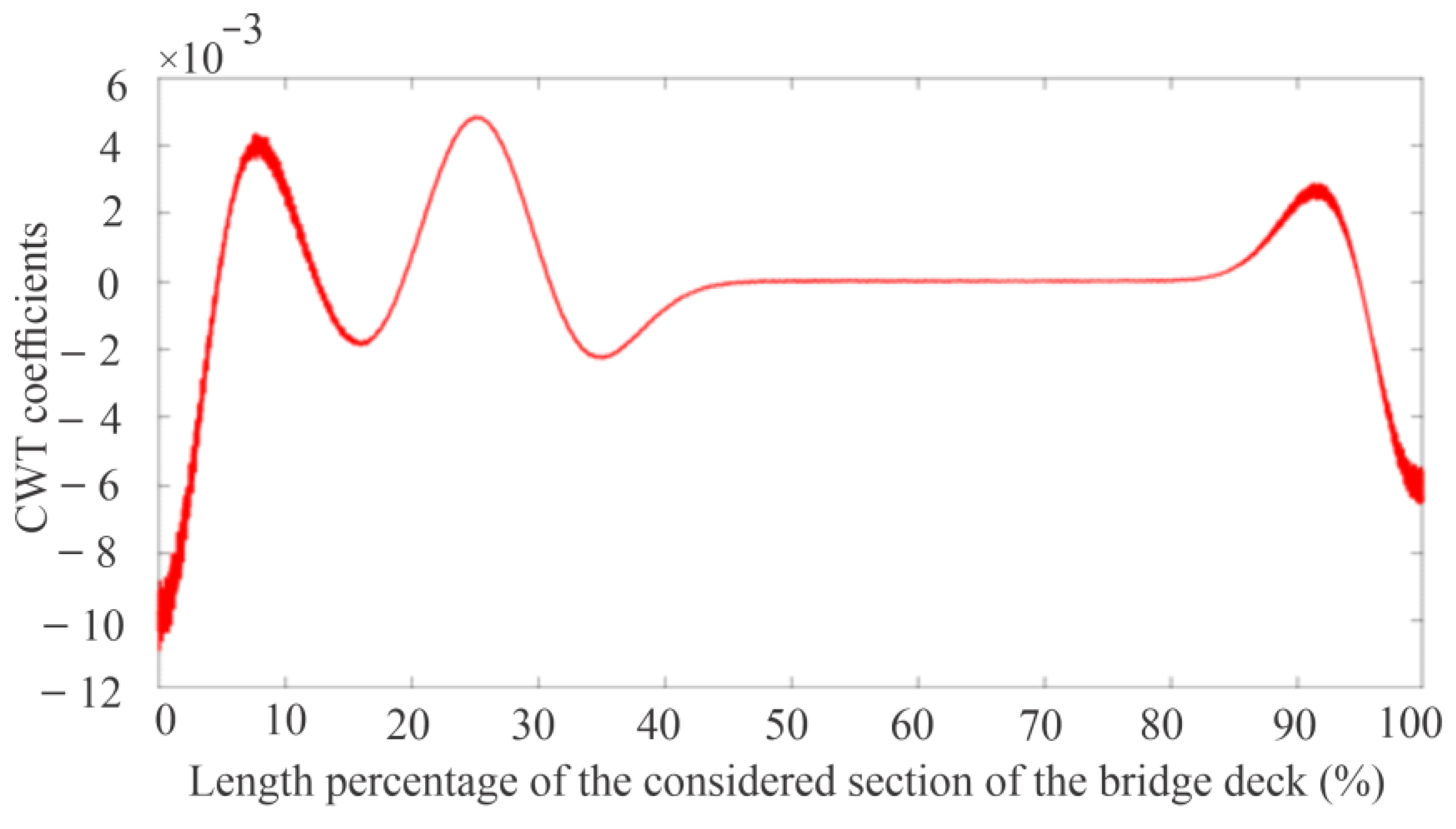
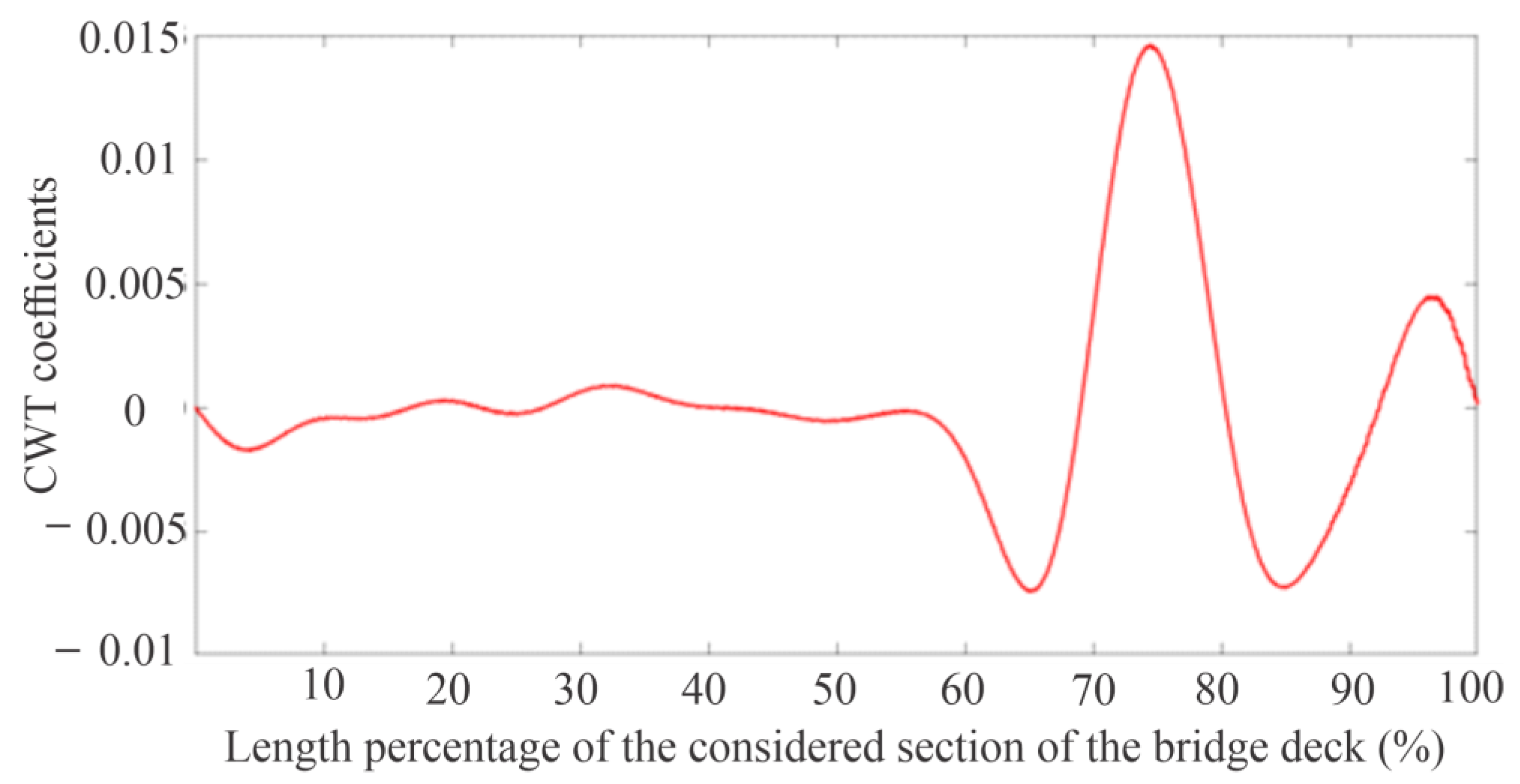
In the same way as was completed for the case shown in
Figure 22, the respective CWT coefficients diagram is obtained for a single scale value (300), but now for a case with damage at 75% of L and measuring only at 25% of L. The results are shown in
Figure 25, and it is possible to see that the damage was identified with high precision (99.40% accuracy) with a single scale value and with a single measurement point, which is the furthest from the damage position.
Finally, for a comparison of identical cases applying the WEAM and the EWM, the scenario presented in the last diagram of
Figure 12 obtained from [
1] applying the MAEW to the bridge with intermediate intensity damage (30%) at 75% of L using filtered signals is used to apply the EWM, and the corresponding diagram is presented in
Figure 26. Comparing both diagrams, it is concluded that the damage located at 75% of L was identified with the WEAM with 99.68% precision (
Figure 12), requiring a processing time for the signals provided by the FEM simulations of 4 min and 49 s; while, on the other hand, the EWM identified the damage with 99.79% accuracy, requiring a computation time of 51 s. In this way, the important benefits of the EWM are verified and justified, since, for the same case of the damage analyzed, the EWM identified the damage with 0.11% greater precision, obtaining results 5.67 times faster.
5. Experimental Results and Analysis
Following the experimental procedure described in
Section 2.2, as well as the damage detection methodology presented in
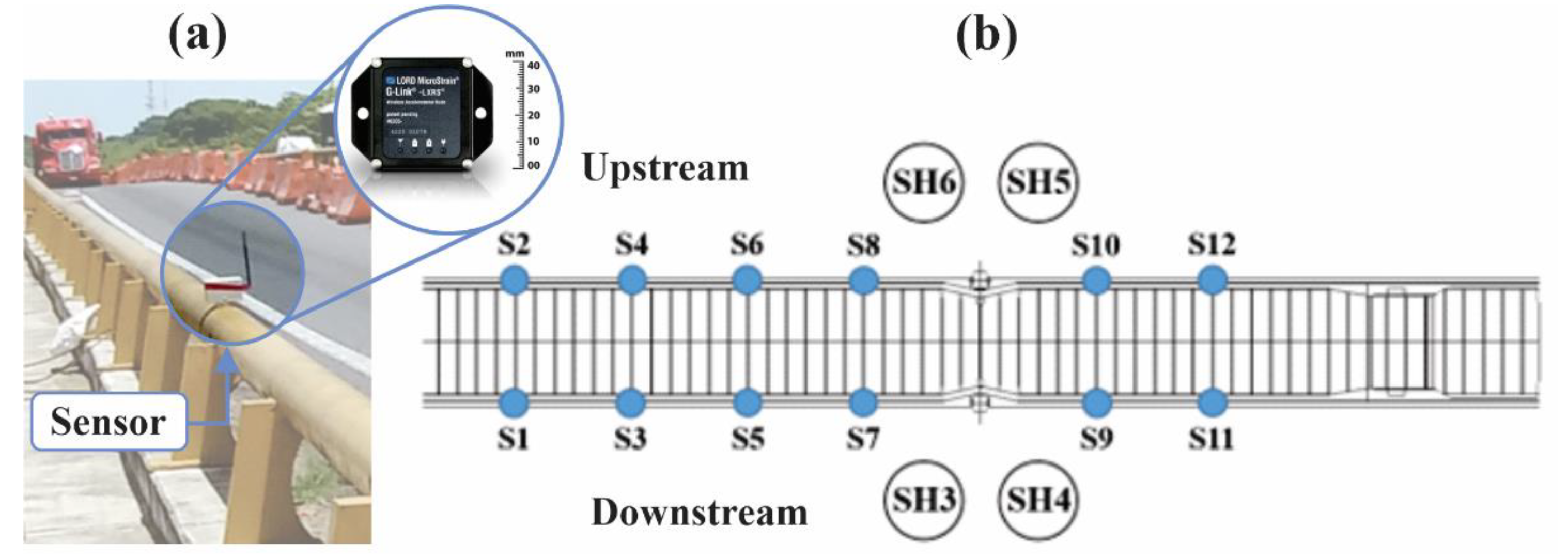
Section 3.3, the entropy–CWT diagram is obtained for the analyzed damaged case (removed cable) and compared with the healthy scenario. Thus, the average SEI for the CWT coefficients considering all measurement points (sensors S1–S12 in
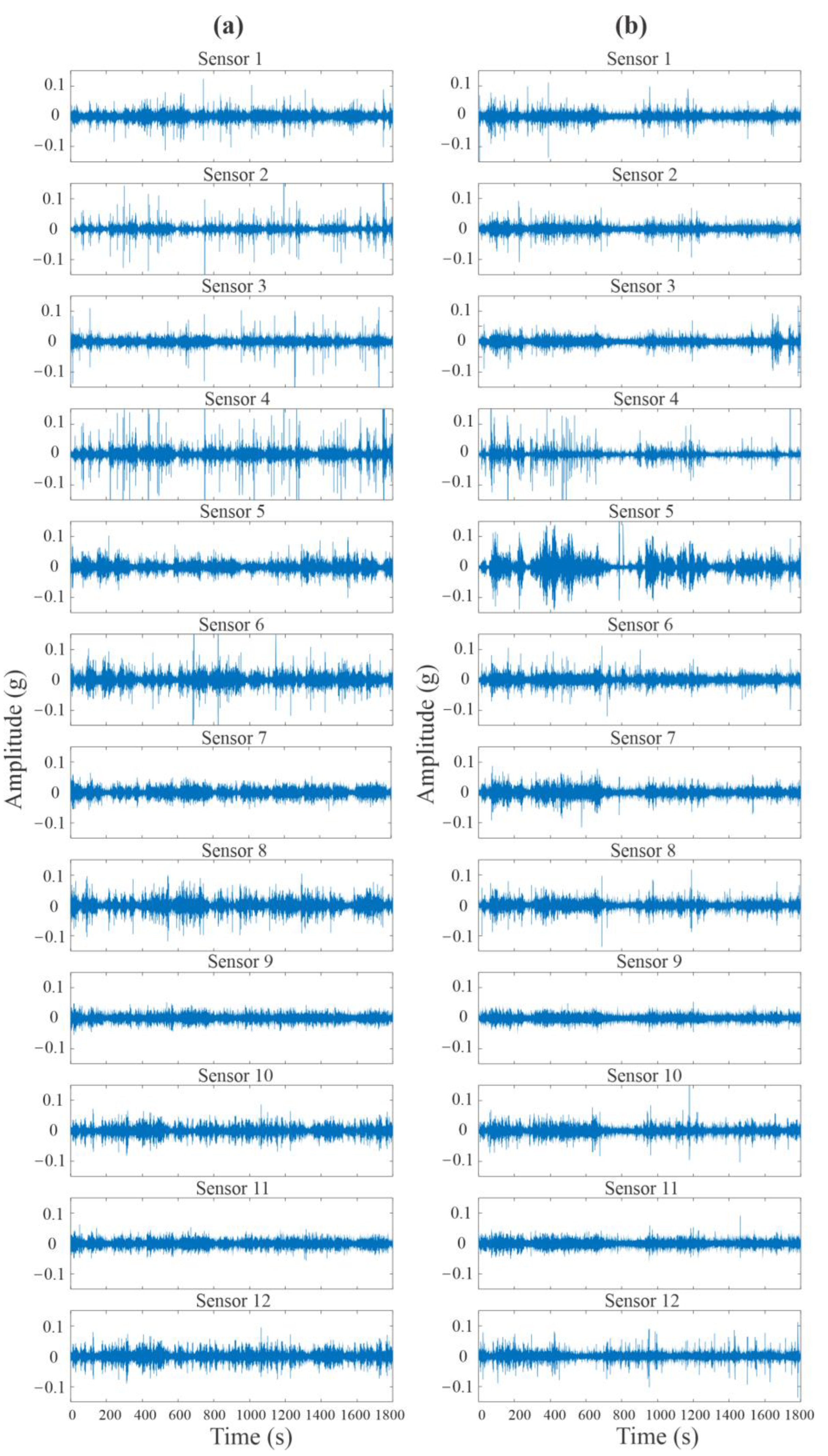
Figure 4) is plotted in just a few seconds. In order to provide some examples of the type of experimental signals acquired/analyzed, in
Figure 27, the experimental time-domain signals acquired from the RPB considering the total time duration of 1800 s for each sensor of the two scenarios (healthy and damaged RPB) are shown, whereas, in
Figure 28, the corresponding entropy–CWT diagram for the damaged case is presented.
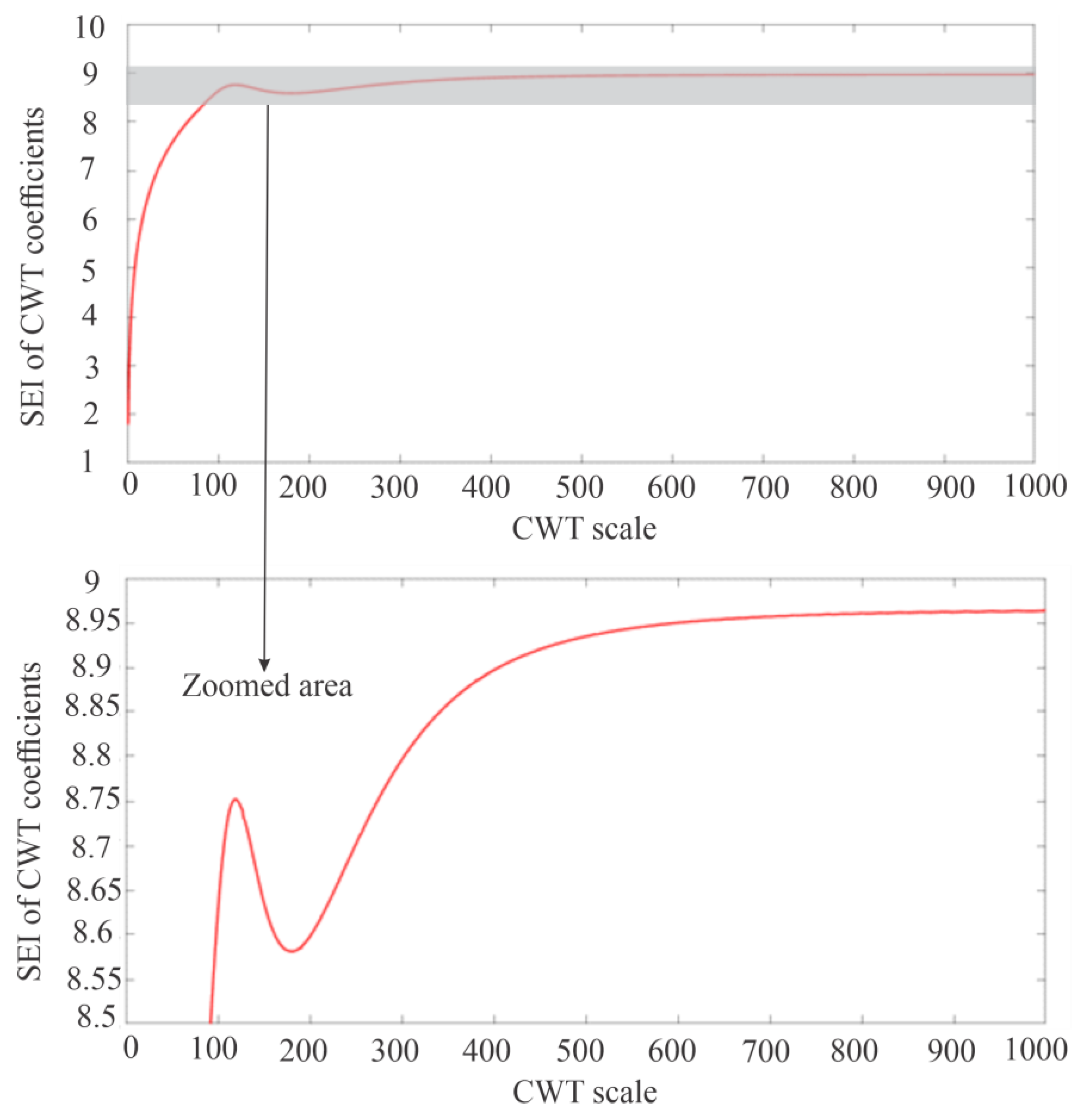
As can be observed in
Figure 28, the useful scale range, used to conduct the analysis and identify damage, is similar to the numerical cases. Therefore, for this experimental case, the scale range considered is from 200 onwards (200 to 1000).
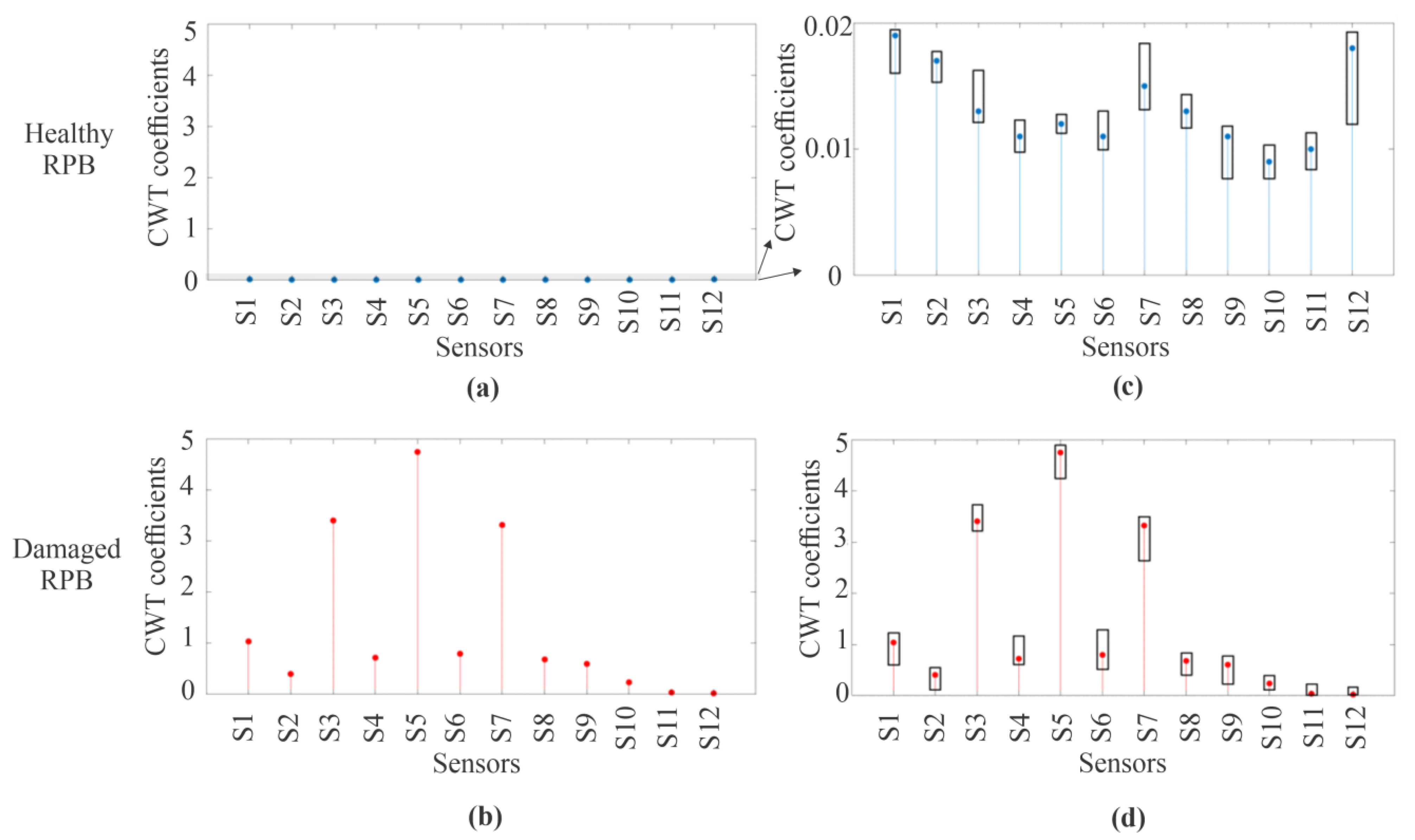
Subsequently, all the signals for the healthy and damaged cases are filtered and extended, taking into account the same type of filter and the parameters used for the numerical cases. After that, the average CWT coefficients for the scale range from 200 to 1000 are calculated for each of the 30 segments of 1 min for each sensor of the healthy bridge (12 sensors) and the damaged bridge (12 sensors). Lastly, the maximum value of the average CWT coefficients for the 720 files are registered; finally, for each sensor of each condition (healthy and damaged), a unique value of the maximum CWT coefficient is obtained considering the average of the 30 respective maximum values of each sensor/condition. These final maximum average values are indicated in
Figure 29 thought solid circles, while the corresponding minimum and maximum values obtained for the respective 30 tests of each case are indicated with horizontal solid lines.
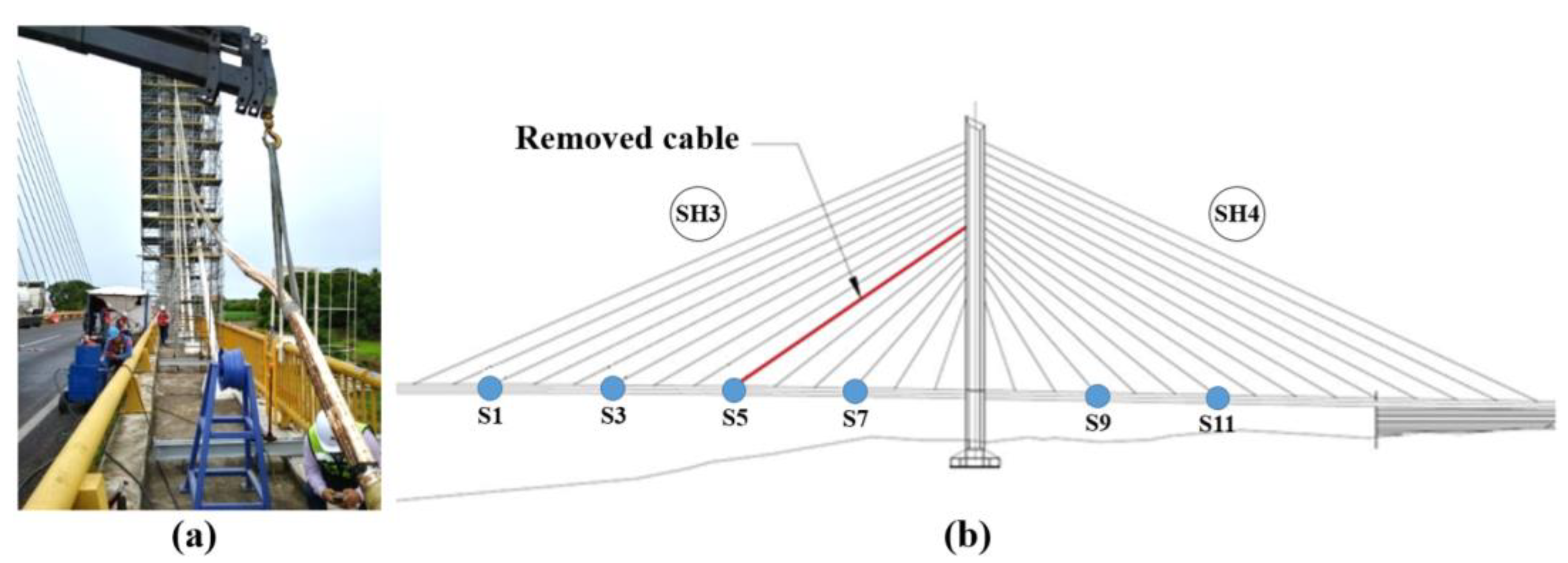
Thus, in the corresponding results presented in
Figure 29, it is possible to observe that, for the damage case, the maximum value of the average CWT coefficients (solid circle) corresponds clearly with sensor S5, whose position on the bridge deck is the same as that of the lower anchoring of the removed cable. On the other hand, if the respective results of the healthy case are compared with the ones of the damaged cases, it is evident that the maximum values of the average CWT coefficients are always higher for the damaged cases. Moreover, there is also a clear tendency that, even when considering the minimum and maximum values obtained for each set of 30 tests, the CWT coefficients are much higher for the damaged RPB, and particularly for the sensor located in the position of damage (S5).
Regardless of whether the experimental validation of a controlled test was not possible with the same conditions as the numerical simulations (just one vehicle crossing the bridge with a specific weight and a specific constant speed) or, conversely, whether the transit was random, the experimental results show good agreement with the numerical results, and they were obtained as fast as the numerical results were, thus validating and highlighting the advantages of this new method, focused mainly on the good precision, low computational burden, efficient obtaining of results, and low cost.
Even though promising results have been achieved in this specific scenario, further research is necessary in order to enhance the robustness of the proposed method. In this regard, it is important to explore other case studies that address the following scenarios: (i) sensor placement does not align with or is far away from the damage zone, (ii) varying quantities of sensors are to be employed, and (iii) a wider range of damages, such as additional cable removal, corrosion, loosened bolts, among others, are present. This calibration of the proposal under these circumstances will allow for the investigation of diverse scenarios where sensor triggering may occur. Currently, the performance of the proposed method can be compromised in these scenarios, as its accuracy in both damage detection and localization heavily relies on the quantity and positioning of the sensors. For instance, a limited number of sensors diminishes the system’s capability of detecting vibrations associated with damage across the entire bridge, and reduces the resolution for determining or identifying the damage location, especially in the context of a large bridge, such as the one analyzed in this work.
Hence, real-world experiments, considering other conditions (additional types of damage and alternative sensor orientations or directions), are essential for validating and calibrating structural health monitoring strategies, but conducting analyses on actual bridges under both healthy and damaged conditions poses significant challenges in terms of human resources, infrastructure, and financial constraints. In addition to the previously mentioned issues, the obtaining of the vibrational signature of a new bridge, through considering all available vibration sensors and their locations, will play a crucial role in assessing the accuracy and sensitivity of the proposed method for detecting and locating various types of damage. This effort will be always supported by modeling and computational simulations.




 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




























