Abstract
In this paper, we introduce a new hybrid inertial accelerated algorithm with a line search technique for solving fixed point problems for demimetric mapping and split equilibrium problems in Hilbert spaces. The algorithm is inspired by Tseng’s extragradient method and the viscosity method. Then, we establish and prove the strong convergence theorem under proper conditions. Furthermore, we also give a numerical example to support the main results. The main results are new and the proofs are relatively simple and different from those in early and recent literature.
1. Introduction
Let C be a nonempty, closed, and convex subset of a real Hilbert space with scalar product and generated norm . Let be a bifunction. The Equilibrium Problem (EP) is of the form
Denote the set of solutions of the EP as . The EP unifies many mathematical models such as the saddle point problems, the variational inequalities, and the optimization problems; see [1,2,3,4,5].
Given a mapping , the Variational Inequality Problem (VIP) obtains a point such that
Solutions to these classes of problems, fixed point problems, and related optimization problems have been investigated and iterative algorithms for approximating them have been proposed and studied by several authors; see [6,7,8,9].
Let and be real Hilbert spaces, and let and, be nonempty closed convex subsets. Let and be bifunctions. The Split Equilibrium Problem (SEP) finds
where is a bounded linear operator. Denote the set of solutions of the SEP as . As we know, the SEP is a generalization of the EP by putting and . The SEP has been found to be useful in the study of many real-world problems such as data compression, sensor networks, medical reconstructions, etc. Additionally, the SEP is an extension of many mathematical models such as the split inclusion problem, the split feasibility problems, and the split variational inequality problems (SVIP, in which the solution set is denoted by SVIP(C,Q)); see [10,11,12] and the references therein.
In order to find a common solution for the fixed point problem for nonexpansive mapping and the SEP, Kazmi and Rizvi [12] suggested the following projection algorithm:
where is nonexpansive and is inverse strongly monotone. Then, the sequence converges strongly to an element in the solution set.
Recently, Jolaoso and Karahan [13] proposed the following general alternative regularization algorithm (Algorithm 1) for approximating a solution of the SEP and the fixed point for demicontractive mapping:
| Algorithm 1: The general alternative regularization algorithm. |
Initialization: Set and let be arbitrary. Step 1. Compute: , where is chosen to be the largest satisfying the following: If , then set and go to Step 3. Otherwise, do Step 2. Step 2. Compute: Step 3. Compute , where Set and return to Step 1. |
Assuming that is a k-demicontractive mapping, is a bounded linear operator with adjoint , is Lipschitz and strongly pseudo-contractive, , and . Then, under certain appropriate assumptions, Algorithm 1 is to proven to converge strongly to the unique element.
On the other hand, in 2001, Alvarez and Attouch [14] used the heavy ball method that was studied in [15,16] for maximal monotone operators on the proximal point algorithm. The algorithm is said to be the inertial proximal point algorithm and it is as follows:
They also proved that the sequence constructed by (1) converges weakly to a zero of T under some suitable conditions.
Moreover, Cai et al. [17] proposed the following modified Tseng’s extragradient (Algorithm 2) for solving the pseudo-monotone variational inequality problem:
| Algorithm 2: The new inertial Tseng’s extragradient iterative algorithm. |
Initialization: Set , and let be arbitrary. Step 1. Given and , , compute
Step 2. Compute , where is chosen to be the largest satisfying the following: If or , then stop. Otherwise, go to Step 3. Step 3. Compute
Step 4. Compute . Set and return to Step 1. |
Assume that is contractive, , and is a sequence in satisfying . Then, they proved that the iterative sequence generated by Algorithm 2 converges to a solution of the pseudo-monotone variational inequality problem under some suitable conditions.
Motivated and inspired by Kazmi and Rizvi [12], Jolaoso and Karahan [13], Alvarez and Attouch [14], and Cai et al. [17], we suggest and analyze a hybrid inertial accelerated method for finding a common element of the set of fixed points of a demimetric mapping and the set of solutions of the split equilibrium problem in a real Hilbert space. We then prove a strong convergence of the proposed method under some mild conditions. Finally, we also provide a numerical experiment to demonstrate the efficiency of the proposed method over some existing ones.
2. Preliminaries
Throughout this paper, we denote the set of fixed points of a mapping T as .
Lemma 1
([18]). In a real Hilbert space , the following hold:
(1) and
(2)
(3)
Lemma 2
([19]). Let C be a nonempty closed convex subset of a real Hilbert space . For and , if and only if
where is the metric projection from onto C.
Definition 1.
A mapping is said to be
- (1)
- nonexpansive, if
- (2)
- γ-contractive, if there exists such that
- (3)
- quasi-nonexpansive, if and
- (4)
- α-strongly pseudo-contractive, if there exists a constant , such that
- (5)
- pseudo-monotone, if
- (6)
- k-demicontractive, if and there exists , such that
- (7)
- k-demimetric, if and there exists , such that
It is clear that the class of k-demimetric mappings contains the classes of k-demicontractive mappings. In 2017, Takahashi [20] also gave an example for a demimetric mapping that is not a demicontractive mapping, as follow:
Example 1
([20]). Let be a real Hilbert spaces and C be a nonempty closed convex subsets of . Denote the metric projection of onto C as . Then, is (-1)-demimetric but is not demicontractive.
Assume that C is a nonempty, convex, and closed subset of a Hilbert space and is a bifunction satisfying the following restrictions:
- (A1)
- , ;
- (A2)
- F is monotone, i.e., , ;
- (A3)
- For all
- (A4)
- For all is convex and lower semicontinuous.
The following lemmas are needed.
Lemma 3
([21]). Let C be a nonempty closed convex subset of a real Hilbert space , and be nonexpansive. Then, the mapping is demiclosed at zero, i.e., if converges weakly to a point and converges to zero; then, .
Lemma 4
([22,23]). Suppose that C is a nonempty close convex subset of a real Hilbert space . Assume that is k-demimetric such that is nonempty. Let κ be a real number with , and define . Then, it holds that
- (1)
- if
- (2)
- T is a quasi-nonexpansive mapping for ;
- (3)
- is a closed convex subset of .
Lemma 5
([24]). Assume that is a sequence of real numbers such that there exists a subsequence of with for all . Then, there exists a nondecreasing sequence such that and the following properties are satisfied for all (sufficiently large) numbers :
Indeed, .
Lemma 6
([25]). Assume that is a sequence of nonnegative numbers satisfying the following inequality:
where satisfy the following restrictions:
- (i)
- ,
- (ii)
- ,
- (iii)
- .
Then, .
Lemma 7
([26]). Assume that satisfies (A1)–(A4). For and , define a mapping as follows:
Then, the following hold:
- (i)
- is single-valued;
- (ii)
- is a firmly nonexpansive mapping, i.e., for all
- (iii)
- (iv)
- is closed and convex.
3. Main Results
Let C and Q be nonempty convex closed subsets of real Hilbert spaces and , respectively, and be a bounded linear operator with adjoint . Assume that and are bifunctions satisfying assumptions (A1)–(A4). Assume that is k-demimetric and that is demiclosed at zero. Let be contractive with constant Assume that and that the following conditions are satisfied:
- (C1)
- , and ;
- (C2)
- , ;
- (C3)
- and , where is generated by Algorithm 3;
- (C4)
- and .
We now introduce the following algorithm:
| Algorithm 3: The hybrid inertial accelerated algorithm. |
Initialization: Set and let be arbitrary. Step 1. Given and , compute
Step 2. Compute , where is chosen to be the largest satisfying the following: If , then stop and is a solution of the SEP. Otherwise, Step 3. Compute
Step 4. Compute , where Set and return to Step 1. |
Before we prove the theorem, we need the following lemmas.
Lemma 8.
Suppose that satisfies (A1)–(A4). For all and , the following inequality holds:
Proof.
Letting and , we obtain
and
Hence,
and
Adding up (3) and (4) yields
Noticing (A2), we have
This implies that
Therefore, we have
which implies
Hence, we have
□
Lemma 9.
Assume that and are real Hilbert spaces, is a linear operator with its adjoint . For any and , define a mapping as . Then, the following statements hold:
- (1)
- ;
- (2)
- .
Proof.
Since is a firmly nonexpansive mapping (Lemma 7(ii)), we deduce that is also firmly nonexpansive. Hence, we have that
and
□
Lemma 10.
Assume that and are real Hilbert spaces, is a linear operator with its adjoint . Suppose that and Then, the following statements hold:
- (1)
- If is a solution of the , then ;
- (2)
- Assume that . Then, is a solution of the .
Proof.
(1) Assume that is a solution of the . Then, and . By Lemma 7(iii), it is easy to see that
(2) Suppose that the solution set of the is nonempty and that . Then by Remark 1, we have
That is,
Thus, we obtain
On the other hand, by Remark 1 again,
Adding (5) and (6), we get
This implies
Suppose that is a solution of the . Then, and . Putting and in (7), we deduce Furthermore,
Hence, Therefore, is a solution of the . □
Remark 1.
By Lemma 7(ii), one can deduce (as in Remark 2.11 from Jolaoso and Karahan [13]) that, for any ,
Lemma 11.
The Armijo-like search rule (2) is well-defined and .
Proof.
Lemma 12.
Suppose that Conditions (C1)–(C4) hold. Let , and be three sequences created by Algorithm 3. Then, for ,
Proof.
Lemma 13.
Suppose that the sequences and are created by Algorithm 3. If and then .
Proof.
Taking any , we know that . This implies that By Lemma 9(2), we obtain that
This together with (9) and Lemma 9(1) implies
Since and we find that Moreover, by Lemma 7(ii), one can deduce
This indicates that
Again using Lemma 7(ii) and the definition of , we derive
which together with (11) gives that . From , one obtains .
According to (C4), there exists a positive number r and some positive integer such that It follows from Lemma 8 that
This combining with Lemma 3, Lemma 7(ii), and yields . Due to the fact that A is a linear bounded operator and , we get
Using (11) and Lemma 8, we obtain
By (12), (13), Lemma 3, and Lemma 7(iii), we get . Thus, we deduce that The proof is completed. □
Theorem 2.
Assume that conditions (C1)–(C4) are satisfied. Then, the iterative sequence constructed by Algorithm 3 converges to q in the norm, where
Remark 2.
We note that the condition (C3) can be easily implemented due to the fact that the value of is known before choosing . Indeed, the parameter can be chosen such that
where and is a positive sequence such that .
We now prove the Theorem 2.
Proof.
First, we prove that the sequence is bounded. Taking any , we infer from Lemma 12 that
In view of the definition of , one deduces
Invoking (C3), there exists a positive constant such that
From (14), (15), and Lemma 4, one obtains
This implies that sequence is bounded. At the same time, using (14), (15), and the definition of , one concludes that , , and are bounded. According to Lemma 1(3), we obtain
where
It follows from Lemma 4, Lemma 12, and (16) that
where Let us rewrite (17) as
Setting and using (14), (16), and Lemma 1(1), we infer
Thus,
We next show the convergence of to zero by the following two cases:
Case 1. Assume that there exists such that the sequence is monotonously decreasing; then, exists. From (C1) and putting n tending to infinity in (18), we derive that
It follows from (C1), (C3), and the definitions of that
By (C1), (C2), (C3), and (19), we obtain
Due to the fact that , we infer
Noticing and resorting to the definition of , Lemma 9(1), and (20), one deduces that
Thanks to (20), (21) and (24), one infers that
Taking into consideration that
we deduce from (22) and (23) that
Noticing , this together with (25) and (26) implies
As is bounded, it indicates that there exists a subsequence of that converges weakly to some and
According to (20), (21), and Lemma 13, we derive . By the assumption that is demiclosed and noticing that (22), (23), and (25), we deduce . Therefore, . It is easy to see that is a contractive mapping. Banach’s Contraction Mapping Principle implies that has a unique fixed point, say, and namely, . It follows from Lemma 2 that
Therefore, we have
This together with (27) implies that
It follows from (14), (16), Lemma 1(3), and Lemma 4 that
Thus, from (28), (C1), (C3), and Lemma 6, we conclude that
Case 2. Assume that is not monotonously decreasing. Then, there exists a subsequence of such that
According to Lemma 5, there exists a nondecreasing sequence such that
Following a similar argument as in Case I, it is easy to obtain
We want to show that
where . Without loss of generality, there exists a subsequence of such that for some and
Like in Case 1, we can also obtain . Thus, we have by Lemma 2 that
This together with (31) implies
Resorting to (14), (16), Lemma 1(3), and Lemma 4, one deduces that
which yields that
Noticing (29), we infer
By applying (C1), (C3), and (32), we get
It thus follows from (30) that
From the above, one can conclude that the sequences constructed by Algorithm 3 converge strongly to , which is the unique fixed point of the contractive mapping . This completes the proof. □
Remark 3.
Compared with the known results in the literature, our results are very different from those in the following aspects.
- The proofs of our main results are simple and different from those in early and recent literature manly due to Lemma 8. More precisely, Lemma 8 together with Lemma 13 presents an interesting and simple method to prove under the conditions and .
- Theorem 2 extends, improves, and develops the corresponding results in [12,13,14,17] from finding a solution for the VIP, a solution for the the EP, or a common solution for the SEP and the fixed point problem for demicontractive mappings to finding a common solution for the SEP and the fixed point problem for demimetric mappings. Moreover, our proof is also different from the one used in those paper.
- The numerical results have shown the effectiveness and fast convergence of our iterative scheme over the iterative schemes in [12,13,14,17].
Corollary 1.
Assume that Conditions (C1)–(C4) are satisfied. Then, the sequence constructed by Algorithm 4 converges strongly to a point q, where
| Algorithm 4: The hybrid inertial accelerated algorithm for the SVIP and the fixed point problem. |
Initialization: Set and let be arbitrary. Step 1. Given and , compute
Step 2. Compute , where is chosen to be the largest satisfying the following: If , then stop and is a solution of the SVIP. Otherwise, Step 3. Compute
Step 4. Compute , where Set and return to Step 1. |
Proof.
In Theorem 2, put and . Then we have that and for all Thus we obtain the desired result from Lemma 2 and Theorem 2. □
4. Application to Split Minimization Problems
Let C be a nonempty, closed, and convex subset of a Hilbert space . The constrained convex minimization problem is to find a point such that
where is a continuous differentiable function.
Lemma 14
Setting , we can easily deduce that satisfies condition (A1)–(A4) and Define a resolvent operator as
From Lemma 7(iii), we get Let us recall the split convex minimization problem (SCMP) as follows:
where C and Q are nonempty convex closed subsets of real Hilbert spaces and , respectively, and are two proper convex differentiable functions, is a bounded linear operator with adjoint . We denote the set of solutions of Problem (35) by By setting and , we have the following theorem follows directly from Theorem 2.
Theorem 3.
Let C and Q be nonempty closed convex subsets of real Hilbert spaces and , respectively. Assume that is a bounded linear operator with adjoint , and are proper convex differentiable functions. Suppose that is k-demimetric such that is demiclosed at zero and that is α-contractive with constant Suppose that the conditions (C1)–(C4) hold and . Then, the iterative sequence constructed by Algorithm 3 converges to q in the norm, where
| Algorithm 5: The general alternative regularization algorithm. |
Initialization: Set and let be arbitrary. Step 1.
Given and , compute
Step 2.
Compute , where is chosen to be the largest satisfying the following:
If , then stop and is a solution of the . Otherwise, Step 3.
Compute
Step 4.
Compute , where Set and return to
Step 1. |
5. Numerical Examples
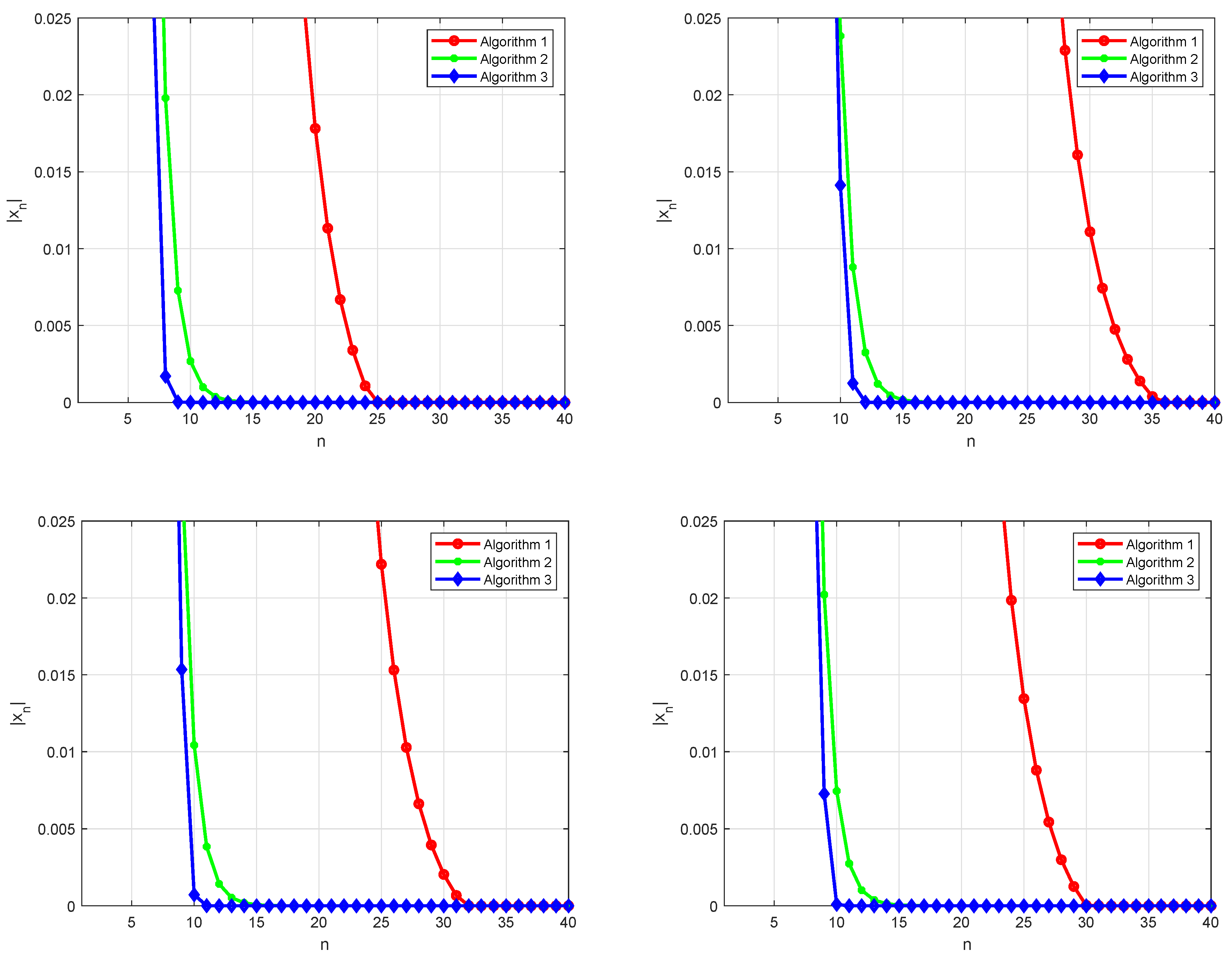
In this subsection, we discuss the numerical behavior of our proposed method in comparison with related methods in the literature. We compare Algorithm 3 with Algorithm 1 (Algorithm 3.1 of Jolaoso and Karahan [13]) and Algorithm 2 (Algorithm 2 of Cai et al. [17]).
Example 4.
Let . Define by for all and by for all . It is easy to observe that and satisfy (A1)–(A4). By Lemma 7, it can be verified that and . Let be given by , be given by , and be given by for all . We can easily deduce that f is a -contraction, that A is a bounded linear operator, and that S is a 0-demimetric mapping. Additionally, it is not difficult to check that Let us choose , , , , and . We test Algorithms 1–3 for different values of and as follows:
Case I: and ;
Case II: and ;
Case III: and ;
Case IV: and .
We now compare the efficiency of Algorithm 3 with Algorithms 1 and 2. According to Figure 1, Table 1, Table 2, Table 3 and Table 4, one finds that Algorithm 3 has a better convergence behavior than Algorithms 1 and 2.
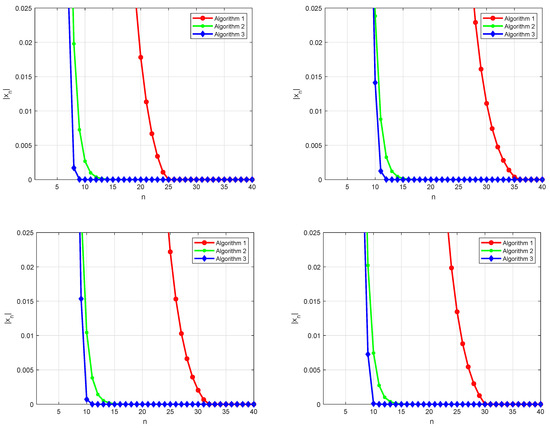
Figure 1.
(Top left) Case I; (top right) Case II, (bottom left) Case III, (bottom right) Case IV.

Table 1.
Numerical results for Example 4 in Case I.
Table 2.
Numerical results for Example 4 in Case II.
Table 3.
Numerical results for Example 4 in Case III.
Table 4.
Numerical results for Example 4 in Case IV.
6. Conclusions
In this paper, we study a new iterative algorithm for solving split equilibrium problems and fixed point problems of demimetric mappings in Hilbert spaces. A theorem of strong convergence was proven under some mild conditions. The numerical behavior of the new algorithm is also studied by reporting a numerical experiment. In particular, it can be seen that the suggested algorithm has competitive advantages over some existing methods.
Funding
This research was supported by the Key Scientific Research Project for Colleges and Universities in Henan Province (grant number 20A110038).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All data in this research are available at request.
Acknowledgments
The authors thank the reviewers and the editors for their valuable comments for improving the original manuscript.
Conflicts of Interest
The author declare no conflict of interest.
References
- Blum, E.; Oettli, W. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Cho, Y.J.; Petrot, N.; Suantai, S. Fixed point theorems for nonexpansive mappings with applications to generalized equilibrium and system of nonlinear variational inequalities problems. J. Nonl. Anal. Opt. 2010, 1, 45–53. [Google Scholar]
- Yao, Y.; Cho, Y.J.; Liou, Y.C. Algorithms of common solutions for variational inclusions, mixed equilibrium problems and fixed point problems. Eur. J. Oper. Res. 2011, 212, 242–250. [Google Scholar] [CrossRef]
- Tan, B.; Qin, X.; Yao, J.C. Strong convergence of self-adaptive inertial algorithms for solving split variational inclusion problems with applications. J. Sci. Comput. 2021, 87, 1–34. [Google Scholar] [CrossRef]
- Tseng, P. A modified forward-backward splitting method for maximal monotone mappings. SIAM J. Control Optim. 2000, 38, 431–446. [Google Scholar] [CrossRef]
- Alakoya, T.O.; Jolaoso, L.O.; Mewomo, O.T. A general iterative method for finding common fixed point of finite family of demicontractive mappings with accretive variational inequality problems in Banach spaces. Nonlinear Stud. 2020, 27, 1–24. [Google Scholar]
- Ogwo, G.N.; Izuchukwu, C.; Mewomo, O.T. Inertial methods for finding minimum-norm solutions of the split variational inequality problem beyond monotonicity. Numer. Algorithms 2021. [Google Scholar] [CrossRef]
- Chidume, C.E.; Maˇruşter, Şt. Iterative methods for the computation of fixed points of demicontractive mappings. J. Comput. Appl. Math. 2010, 234, 861–882. [Google Scholar] [CrossRef] [Green Version]
- Cai, G.; Dong, Q.-L.; Peng, Y. Strong convergence theorems for solving variational inequality problems with pseudo-monotone and non-Lipschitz operators. J. Opt. Theory Appl. 2021, 188, 447–472. [Google Scholar] [CrossRef]
- Censor, Y.; Bortfeld, T.; Martin, B.; Trofimov, A. A unified approach for inversion problem in intensity-modulated radiation therapy. Phys. Med. Biol. 2006, 51, 2353–2365. [Google Scholar] [CrossRef] [Green Version]
- Ansari, Q.H.; Rehan, A. Split feasibility and fixed point problems. In Nonlinear Analysis: Approximation Theory, Optimization and Application; Ansari, Q.H., Ed.; Springer: New York, NY, USA, 2014; pp. 281–322. [Google Scholar]
- Kazmi, K.R.; Rizvi, S.H. Iterative approximation of a common solution of a split equilibrium problem, a variational inequality problem and a fixed point problem. J. Egypt. Math. Soc. 2013, 21, 44–51. [Google Scholar] [CrossRef] [Green Version]
- Jolaoso, L.O.; Karahan, I. A general alternative regularization method with line search technique for solving split equilibrium and fixed point problems in Hilbert spaces. Comput. Appl. Math. 2020, 39, 1–22. [Google Scholar] [CrossRef]
- Alvarez, F.; Attouch, H. An inertial proximal method for monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Polyak, B.T. Introduction to Optimization; Optimization Software: New York, NY, USA, 1987. [Google Scholar]
- Polyak, B.T. Some methods of speeding up the convergence of iterarive methods. Z. Vychisl. Mat. Mat. Fiz. 1964, 4, 1–17. [Google Scholar]
- Cai, G.; Shehu, Y.; Iyiola, O.S. Inertial Tseng’s extragradient method for solving variational inequality problems of pseudo-monotone and non-Lipschitz operators. J. Ind. Manag. Optim. 2021. [Google Scholar] [CrossRef]
- Takahashi, W. Introduction to Nonlinear and Convex Analysis; Yokohama Publishers: Yokohama, Japan, 2009. [Google Scholar]
- Marino, G.; Xu, H.K. Weak and strong convergence theorems for strict pseudo-contractions in Hilbert spaces. J. Math. Anal. Appl. 2007, 329, 336–349. [Google Scholar] [CrossRef] [Green Version]
- Takahashi, W. The split common fixed point problem and the shrinking projection method in banach spaces. J. Convex Anal. 2017, 24, 1015–1028. [Google Scholar]
- Browder, F.E. Convergence of approximants to fixed points of nonexpansive nonlinear mappings in Banach spaces. Arch. Ration. Mech. Anal. 1967, 24, 82–90. [Google Scholar] [CrossRef]
- Takahashi, W.; Wen, C.F.; Yao, J.C. The shrinking projection method for a finite family of demimetric mappings with variational inequality problems in a Hilbert space. Fixed Point Theory 2018, 19, 407–420. [Google Scholar] [CrossRef]
- Song, Y. Iterative methods for fixed point problems and generalized split feasibility problems in Banach spaces. J. Nonl. Sci. Appl. 2018, 11, 198–217. [Google Scholar] [CrossRef] [Green Version]
- Maingé, P.E. The viscosity approximation process for quasi-nonexpansive mappings in Hilbert spaces. Comput. Math. Appl. 2010, 59, 74–79. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.K. Iterative algorithm for nonlinear operators. J. Lond. Math. Soc. 2002, 2, 1–17. [Google Scholar] [CrossRef]
- Combettes, P.L. Hirstoaga, S.A. Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6, 117–136. [Google Scholar]
- Su, M.; Xu, H.-K. Remarks on the gradient-projection algorithm. J. Nonlinear Anal. Optim. 2010, 1, 35–43. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).